
Анализ информационной безопасности современного автомобиля
Уже более века автомобили являются неотъемлемой частью нашей жизни. Со временем эти транспортные средства становятся все более сложными, более оснащенными новейшими электронными устройствами для улучшения их эксплуатационно – технических свойств.
В 1990 г. электронные устройства и программное обеспечение составляли около 16 % стоимости автомобиля, в 2001 г. – 25 %, а в 2005 г. – до 40 % [1]. По оценкам специалистов Центра автомобильных исследований штата Мичиган, по состоянию на 2014 г. электроника и программное обеспечение составляют уже до 40-50 % [2] стоимости современного автомобиля. Также по данным Инженерной Ассоциации IEEE известно, что программное обеспечение представляет 90 % [3] инноваций в автомобилях.
Устойчивая тенденция увеличения количества электронных устройств в современных автомобилях с проводным и беспроводным подключением неизбежно приводит к росту уязвимостей, а значит – снижению безопасности и эффективности эксплуатации.
Требования к информационным системам современного автомобиля и к их пропускной способности растут вслед за появлением новых сложных приложений — например, систем обеспечения безопасности или систем обработки мультимедийной информации. Существующие сети управления транспортным средством, такие как LIN, CAN и FlexRay, не могут покрыть растущие требования по пропускной способности и расширяемости, которые нужны для различных систем помощи водителю. Новые сетевые технологии должны перенять как можно больше от бытовых и других неавтомобильных областей, но с учетом требований конкретных авто приложений. У Ethernet есть все предпосылки для такого комплексного подхода. Он может быть использован в основной магистрали для подключения различных областей, а также для подсетей, которые просто требуют большей пропускной способности.
Коммутируемая сеть Ethernet основана на связи «точка–точка», где пропускная способность более эффективно использована по сравнению с транслирующими системами, такими как CAN или FlexRay. Принцип коммутации может быть с успехом применен для преодоления границ доменов без затрат времени на упаковку и повторную сортировку передаваемых сообщений или пакетов, как это требуется в смешанном межсетевом интерфейсе.
Использование Ethernet в транспортном средстве означает смену парадигмы в разработке следующего поколения автомобильных компьютерных сетей: подключение различных сетевых доменов, транспортировки различных видов данных (управляющие сигналы, потоковая передача данных и др.) и выполнение строгих требований надежности в тяжелых условиях расширенного температурного диапазона и электромагнитной совместимости.
Таким образом, анализ информационной безопасности современного автомобиля и поиск методов защиты информационных систем являются актуальными научными задачами и требуют изучения со стороны ученых и инженеров.
Цель дипломной работы: является повышение информационной безопасности автомобиля путем анализа возможных угроз и перспективных методов защиты информационных систем.
Для достижения поставленной цели в дипломном проекте поставлены и решены следующие задачи:
- Проведен анализ литературных данных современного состояния информационной безопасности автомобиля
- Сбор и наладка испытательного стенда
- Проведение испытаний с использованием программного обеспечения Vector Informatik GmbH.
- Выполнено технико-экономическое обоснование проекта.
- Рассмотрены вопросы безопасности, экологичности производства и охраны труда.
- Выводы
1 СОВРЕМЕННОЕ СОСТОЯНИЕ ИНФОРМАЦИОННОЙ БЕЗОПАСНОСТИ АВТОМОБИЛЯ
В этой главе кратко описываются события, показывающие эволюцию до автомобильного Ethernet
Начиная с 1980-х годов производители автомобилей осознали, что им необходимо пересмотреть внутреннее устройство автомобиля. С одной стороны, использование большого количества кабелей, делали автомобиль громозким и неуклюжим, с другой стороны – появление новых функций требовали себе новые пути к управлению транспортом [4]. Вследствие того, что создание соединений точка-точка между всеми электронными блоками
На сегодняшний день новый автомобиль содержит от 50 до 100 и более электронных блоков управления [5]. В работе [6] указывается, что к 2025 г.
100 % автомобилей будут подключены к информационным системам, а в работе [7] – что к 2035 г. 75% автомобилей будут автономными.
Авторами ряда работ [8, 9] установлено, что злоумышленники могут получить удаленный доступ к электронным системам транспортных средств, управлять их компонентами или похищать личные данные автовладельцев. Помимо злоумышленников, атаки на автомобильные сети также могут проводиться в целях корпоративного шпионажа [10]. Современная аппаратура позволяет создавать различные степени повреждений – от радиочастотных помех вплоть до физического повреждения сетевых компонентов автомобиля.
Исследование состояния информационной безопасности показывает, что среди 173 исследованных автомобильных компаний по всему миру, число происшествий, выявленных в 2015 г. увеличилось на 32 % по сравнению с 2014 г. [11]. 98% всех протестированных программных приложений в автомобилях имеют серьезные дефекты, некоторые – от 10 до 15 [7]. В указанном исследовании приводятся и первые инциденты – взлом системы управления транспортом, приведший к аварии и пробкам на дорогах; кража автомобиля; блокирование GPS-отслеживания и угон инкассаторского автомобиля; взлом и перехват управления автомобилем Toyota Prius; произвольное ускорение автомобиля; подмена маршрута транспортных средств и т.д.
Стрелки» [10], установленные на дорогах Подмосковья, ущерб для областного бюджета составил около 2 млн. рублей. Причиной сбоя, как выяснили в правительстве Подмосковья, стал компьютерный вирус, который вывел из строя 130 камер из 144 на семь дней.
В 2015 г. эксперты журнала Wired [12] провели показательный дистанционный взлом компьютерной системы Uconnect нового автомобиля Jeep Cherokee. Действуя с помощью ноутбука из другого города, программисты Ч. Миллер и К. Валасек сумели получить доступ к важным функциям автомобиля, включая самопроизвольный разгон, торможение, работу стеклоочистителей и т.д. В результате 1,4 млн. автомобилей с системой Uconnect соответствующей модификации были отправлены на сервис, а Национальное ведомство по вопросам дорожной безопасности NHTSA оштрафовало производителя на 105 млн. долларов [13] по целому ряду оснований: несвоевременный отзыв транспортных средств, недостаточный контроль безопасности, сокрытие информации от владельцев и властей и т.д.
По последним данным полиции Лондона [11], более трети всех угонов в столице Великобритании происходит с помощью перепрограммирования ключа зажигания, после чего преступникам требуется максимум 10с на кражу. Угонщики используют вредоносные компьютерные программы, в том числе для получения контроля над спутниками. Это дает им возможность послать с орбиты сигнал – разблокировать двери, отключить сигнализацию и запустить двигатель нужного автомобиля. Данная проблема касается не только премиальных моделей, все современные автомобили подвержены рискам высокотехнологичных угонов [13].
Автомобиль премиум – класса, выпуска начиная с 2012 года имеет около 100 EGUs [14]. Важным становится и сочетание информационно – развлекательной системы и вспомогательное вождение с помощью камер. В результате скорость передачи данных с одного объекта на другой не удовлетворяет всех потребностей современных транспортных средств. Ethernet для автомобилей является открытым стандартом и определяет два нижних уровня эталонной модели взаимодействия открытых систем. За последние десятилетия комитет по стандартизации IEEE 802 установил несколько физических уровней от 10 Мбит до 10 Гбит. IEEE 802.3u (100Base-TX) широко используется в бытовых и промышленных областях, а недавно был применен для диагностики автомобилей через IP, как описано в ISO 13400.
Более того, новые достижения в технологии позволили автомобильному Ethernet работать на одном кабеле неэкранированной витой пары (UTP).
В связи с тем, что Ethernet уже много лет является стандартом для соединения компьютеров, многолетний опыт взлома компьютеров может быть использован для взлома автомобилей. Только физический уровень автомобильной системы связи претерпевает значительные изменения с использованием новых схем кодирования и методов модуляции. Более высокие уровни в основном будут сохраняться в автомобильном Ethernet, поэтому безопасность стала главной проблемой.
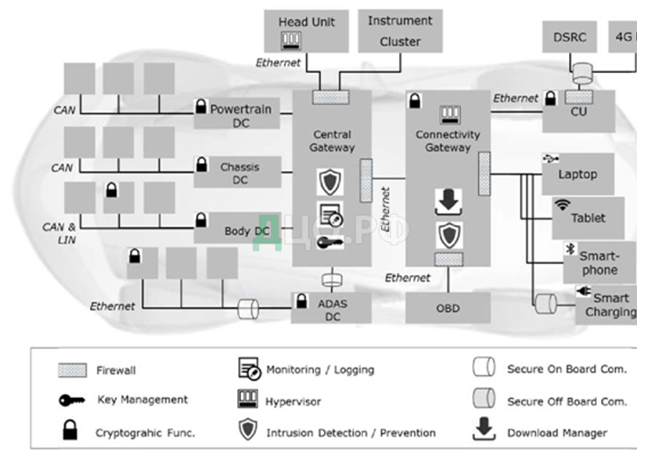
На рисунке 1 показана типичная топология автомобильной сети с оптимальной защитой. К сожалению, не все коммуникации, обозначенные как безопасные, всегда верно. Как можно видеть, сеть состоит из нескольких сетей. Ethernet использует систему ADAS, систему помощи водителю. Это набор определенных алгоритмов, которые в разной степени помогают водителю в быстром принятии решений для безопасного и легкого управления транспортным средством. Компьютерная диагностика автомобиля (OBD, англ. On-board diagnostics) — это диагностика различных систем автомобиля, производящаяся блоком управления автомобиля. Головным устройством, расположенным на приборной панели соединено все между собой центральным шлюзом.
Группа специалистов по внедрению AVB-технологий (Audio/Video Bridging) из AVnu Альянса [15] определила IEEE-стандарты, включающие службы высокого уровня для IEEE 802-совместимых сетей (рисунок 2). Протоколы IEEE 802.1 AS, QAT, QAV и BA определяют расчет времени и синхронизации, распределение поточной передачи, перенаправление и организацию очередей в системах аудио/видео захвата. Кроме того, протокол транспортного уровня по стандарту IEEE 1722 облегчает поток чувствительного ко времени аудио и/или видео через AVB Ethernet-сети и совместимость между конечными станциями.
В системах помощи водителю для таких функций, как круговой обзор, все чаще используются видеокамеры. Деятельность по стандартизации на уровне протоколов связи и на физическом уровне недавно привела к появлению ISO 17215, который называется «Интерфейс передачи видео для камер». В целях дальнейшего развития автомобильной технологии Ethernet Broadcom сформировала организацию One Pair EtherNet (OPEN) Alliance Special Interest Group. OPEN Alliance будет работать над стандартизацией компонентов и проводить тесты, основанные на технологии Broadcom Broad-Reach [16]. Другой целью группы является сбор требований для будущих технологий, таких как Reduced Pair Gigabit. Наконец, AUTOSAR (Automotive Open System Architecture) является открытой и стандартизированной архитектурой программного обеспечения для автомобильного Ethernet.
Ethernet не был разработан для сетей TDMA (множественный доступ со временным разделением или уплотнением, МДВУ), и все еще необходимо найти подходящее решение для достижения требуемой производительности в реальном времени и качества обслуживания. AVB уже включает в себя меры по обеспечению своевременной доставки медиа-потоков.
Для рабочей группы Automotive AVB Gen2 улучшение времени ожидания является одной из основных целей. Первое приложение синхронизированного по времени Ethernet (Time-Triggered Ethernet, TTE) было применено в авиационной технике [17] с высочайшими требованиями безопасности. Определенный в SAE AS6802 и отличный от аудио/видео технологий TTE основан на распределенном алгоритме тактовой синхронизации, который в конце концов приводит к получению точного, с детерминированным режимом, графика работы.
Хотя совместная интеграция AVB и TTE возможна [14], необходимы дальнейшие исследования, чтобы обеспечить их использование в автомобильных приложениях, где мультимедийные потоки, данные контроля в режиме реального времени, а также диагностическая информация и обновления программного обеспечения должны передаваться в одной и той же сети.
1.1 Поколение
Поколение 1. Диагностика по IP
Первые приложения Ethernet в автомобилестроении — это встроенная диагностика и обновление flash-памяти ЭБУ. Для чтения диагностических данных и обновления программного обеспечения в течение отведенного времени производительность существующих систем, таких как CAN и FlexRay, была недостаточна. Ethernet 100 Base-TX категории 5 был выбран в качестве средства связи между автомобилем и диагностическим оборудованием. Высокая пропускная способность Ethernet экономит затраты на обслуживание и производство. ISO 13400 и ISO 14229 изменили существующие и определили новые, стабильные современные диагностические стандарты. Универсальные продукты и компоненты давно доступны, а такие требования, как прочность и температурные допуски, были смягчены для данного конкретного применения Ethernet в автомобиле.
Большая часть автомобильной электронной сети использует протокол управления передачей / Интернет-протокол (TCP/IP). Несмотря на то, что Министерство обороны США финансировало создание пакета TCP/IP, безопасность не была высокой в списке приоритеты в конце 1970-х годов, когда он был разработан, так как основной упор был сделан на коммуникацию для совместного использования ресурсов. Это привело к множественным уязвимостям, которые были обнаружены и использованы в реализациях стека протоколов TCP / IP. Некоторые из этих уязвимостей были задокументированы еще в 1989 году [6].
С учетом всего сказанного главный вопрос, который исследует этот тезис: «Является ли автомобильный Ethernet вместе с сопровождающими его протоколами безопасными и достаточно безопасными для автомобильной промышленности?»
Поколение 2. Системы помощи водителю и развлечения
Второе поколение автомобильного Ethernet будет заниматься информационно-развлекательными системами и видеонаблюдением для кругового обзора. Современные решения камер заднего вида часто используют LVDS (Low-Voltage Differential Signaling, низковольтная дифференциальная передача сигналов) для передачи видео, что хорошо работает в случае использования одной камеры. В недалеком будущем ожидается применение нескольких камер, а также получение данных с радиолокационного датчика расстояния (рисунок 3). LVDS-система становится неэффективной с точки зрения прокладки проводов и дороговизны кабелей и разъемов. Ethernet позволяет видеокамерам быть подключенными к центральному блоку управления для синхронизации и дальнейшей обработки.
Ethernet-камеры могут дополнительно использовать «энергоэффективный Ethernet» (IEEE 802.3az), в рамках которого вводится Low-Power Idle (LPI, «режим простоя») и пробуждение по необходимости для экономии энергии, пока камеры не используются. Кроме того, решения для питания через Ethernet (PoE) являются предпочтительнее, поскольку они позволяют уменьшить количество проводов. Преимущества более высокой пропускной способности и низкого времени ожидания очевидны. Использование нескольких камер высокого разрешения для обнаружения объекта требует несжатой передачи данных, чтобы избежать образования артефактов сжатия при обнаружении препятствий, а также сильного драйвера с высокой пропускной способностью.
Поколение 3. Ethernet как основа сетей инфраструктурыПоследние решения, касающиеся развлекательных систем, основаны главным образом на патентованных и не масштабируемых технологиях. Ethernet в этой новой области применения является экономически эффективным за счет использования стандарта AVB. Синхронизированная передача видео- и аудиоданных с гарантированной задержкой может быть достигнута с применением существующих AVB-компонентов Ethernet 1-го поколения. В этом направлении помогут развиваться как работа по стандартизации AVnu, так и самые последние разработки коммутирования и протоколов физического уровня (PHY) на основе Broad-Reach.
В то время как для первого и второго поколений работа Ethernet ограничивается устройством подсетей некоторых приложений, таких как информационно-развлекательные или системы помощи водителю, с третьим поколением Ethernet станет основой в автомобильной сети. Типичная магистраль показана на рисунке 4. При разработке такой сети основной идеей будет двусторонняя связь между ЭБУ, которая организована через сетевое администрирование.
Еще одной особенностью новой архитектуры является то, что будет только одна магистральная сеть Ethernet, в которой должна осуществляться передача различных классов данных: диагностическая информация, видео/аудио-потоки и высоконадежные данные управления. В то время как AVB Ethernet и TTE уже могут обеспечивать различные уровни качества обслуживания в режиме реального времени, необходимо продолжать исследования и разработки для проверки безопасного сосуществования этих различных классов передачи данных в одной сети.Сеть связи будет иерархически организована с контроллерами домена, подключенными через магистраль Ethernet. Подсети ниже контроллеров домена могут также быть на основе Ethernet, с переключателями между уровнями. Эта структура обеспечивает масштабируемое решение, поскольку каждый порт коммутатора в общем случае может быть реализован как 10-Мбит, 100-Мбит и 1-Гбит без каких-либо изменений в высших уровнях протокола. Новизна подхода заключается в том, каким образом сообщение передается через доменные границы к месту назначения. В современных сетях и межсетевых интерфейсах реализация этой функции заключается в IP-маршрутизации с помощью коммутаторов и роутеров, что и предлагается для магистральных сетей. Преимущество заключается в полной независимости IP-маршрутизации от конкретной реализации, что позволяет создать единое решение для автомобильной сети. Кроме того, идея IP позволяет легко подключить автомобиль к Интернету [8] (эта возможность важна главным образом тем пользователям, кто хочет иметь в машине доступ к интернет-услугам в той же степени, что и в домашних условиях).
BroadR-Reach — 100-Мбит Ethernet для автомобильных решений
Хотя 100-Мбит Ethernet и IP- технология были доступны с начала 1990-х гг., прошло почти два десятилетия, прежде чем появился интерес к ним как к следующему поколению стандартных сетей со стороны автомобильной промышленности. Это произошло отчасти из-за отсутствия должного физического уровня, подходящего для использования в транспортных средствах. Рисунок 5 показывает технические принципы и объясняет, почему ориентированный на потребителя физический уровень Fast и Gigabit Ethernet не применим в машине. Fast Ethernet базируется на MLT-3 сигнальной схеме (выделение трех уровней «+»/«0»/«–») и имеет однонаправленную связь по двум витым парам кабеля. Gigabit достигает десятикратного роста скорости передачи данных путем введения двунаправленного обмена на четырех витых парах кабеля и сигнальной схемы PAM-5. Чтобы компенсировать 6-дБ потери сигнал–шум в PAM-5 по сравнению с MLT-3 и избежать ошибок, используется решетчатый код (код Треллиса).
Применение в автомобиле навязывает значительно более высокие требования к электронным системам и их компонентам (по сравнению с обыкновенным потребительским применением) главным образом с точки зрения электромагнитной совместимости [ISO11452] и условий окружающей среды. Первые исследования показали, что Broad-Reach подходит для использования в автомобиле. Однако для достижения надежности следующего поколения автомобильных сетей должны быть разработаны новые оптимизированные компоненты (рисунок 6). По сравнению со стандартным Fast Ethernet, спецификации могут быть значительно снижены. Применение емкостной связи вместо обычного трансформатора, усиления на аппаратном уровне — в составе протокола физического уровня, синфазных дросселей (CMC), разделительных конденсаторов, разъемов и кабеля неэкранированной витой пары — все это очень похоже на FlexRay или CAN-связь.Высокая скорость передачи в 125 Мбод для Fast и Gigabit Ethernet вносит значительный вклад в электромагнитное излучение в критическом FM-радиодиапазоне и, следовательно, исключает использование недорогой неэкранированной витой пары в автомобильной среде. С использованием Broad-Reach технологии удалось почти вдвое сократить скорость передачи (до 66,6 Мбод), что позволяет использовать неэкранированную витую пару. В принципе, Broad-Reach можно рассматривать как «легкую» версию Gigabit с двунаправленной связью при использовании только одной пары проводов. Благодаря PAM-3 сигнализации может быть достигнута передача данных с погрешностью менее 10-10 даже без внесения поправок на ошибки.
Технология Broad-Reach, допускающая использование неэкранированной витой пары, делает Ethernet экономически конкурентоспособным для применения в автомобильной промышленности. FlexRay-кабель в состоянии справиться с тяжелыми условиями окружающей среды, поэтому он применим для автомобильного Ethernet. Однако, в отличие от бытовых применений, требуется тщательное изучение влияния условий окружающей среды (главным образом температуры) на целостность сигнала Ethernet.Протокол физического уровня в качестве интерфейса между аналоговыми средствами передачи и цифровыми MAC-контроллерами во многом определяет надежность связи. В то время как потребительский протокол физического уровня оптимизирован для поддержки кабелей длиной более 100 м, в автомобиле, как правило, приходится иметь дело с длиной менее 10 м. Задача здесь состоит в том, чтобы найти источник импульсов и приемник, оптимизированные для таких длин кабеля, которые смогут удовлетворить строгим требованиям излучения и защищенности. На рисунке 7 показан спектр сигнала передатчика NXP с оптимизированным формированием импульсов, доказывающим, что проблема излучения может быть решена без использования дорогостоящего фильтра низких частот. Для сравнения: соответствующий спектр сигнала передатчика Fast Ethernet показывает более высокий сигнал в критическом FM-диапазоне.
Рисунок 8 иллюстрирует сравнительное моделирование глазковой индикации на 20 м кабеля FlexRay при комнатной и повышенной (+105 °C) температурах кабеля. Большая «сжатость» глазковой диаграммы при высоких температурах указывает на рост межсимвольной интерференции (ISI) в результате ограничения пропускной способности кабеля. Пока длина кабеля составляет менее 20 м, снижение отношения сигнал–шум может быть обычно скомпенсировано адаптивным выравниванием в приемнике без увеличения частоты появления ошибочных битов.
1.2 Сети и уровни передачи данных
В первые годы существования компьютеров люди понимали, что необходимо найти способ передачи данных с одного устройства на другое без использования портативных носителей. Кроме того, необходимо было использовать дорогостоящее периферийное оборудование, которое присутствует не на всех устройствах. В настоящее время в автомобильной сфере имеется несколько датчиков и исполнительных механизмов, которые необходимо соединить и в дальнейшем использовать эти данные для автоматизации.
Сеть объединяет группу устройств вместе для определенной цели или для нескольких целей. Эти сетевые устройства называются хостами. Интернет-протокол версии 4 (IPv4) использует термин хост для всех устройств в сети [10]. В отличие от этого, интернет-протокол версии 6 (IPv6) идет дальше и определяет узлы как «устройство, которое реализует IPv6», а хост — это «любой узел, который не является маршрутизатором» [11].
Сетевая модель OSI — это эталонная модель взаимодействия открытых систем, на английском звучит как Open Systems Interconnection Basic Reference Model. Ее назначение в обобщенном представлении средств сетевого взаимодействия. То есть модель OSI — то обобщенные стандарты для разработчиков программ, благодаря которым любой компьютер одинаково может расшифровать данные, переданные с другого компьютера. Чтобы было понятно, приведу жизненный пример. Известно, что пчелы видят все окружающее их в ультрафиолетовом свете. То есть одну и ту же картинку наш глаз и пчелиный воспринимает абсолютно по-разному и то, что видят насекомые, может быть незаметно для зрения человека. То же самое и с компьютерами — если один разработчик пишет приложение на каком-либо программном языке, который понимает его собственный компьютер, но не доступен ни для одного другого, то на любом другом устройстве вы прочитать созданный этим приложением документ не сможете. Поэтому пришли к такой идее, чтобы при написании приложений следовать единому своду правил, понятному для всех [18,19]. Эталонная модель OSI показана на рисунке 9, а путь, по которому данные перемещаются от одной точки к другой в соответствии с моделью ISO OSI показан на рисунке 10.
Уровни OSI Для наглядности процесс работы сети принято разделять на 7 уровней, на каждом из которых работает своя группа протоколов [20]. Сетевой протокол — это правила и технические процедуры, позволяющие компьютерам, объединенным в сеть, осуществлять соединение и обмен данными. Группа протоколов, объединенных единой конечной целью, называется стек протоколов [21,22]. Для выполнения разных задач имеется несколько протоколов, которые занимаются обслуживанием систем, например, стек TCP/IP. Давайте здесь внимательно посмотрим на то, каким образом информация с одного компьютера отправляется по локальной сети на другой компьютер.
Задачи компьютера ОТПРАВИТЕЛЯ [23]:
- Взять данные из приложения;
- Разбить их на мелкие пакеты, если большой объем, подготовить к передаче, то есть указать маршрут следования, зашифровать и перекодировать в сетевой формат.
Задачи компьютера ПОЛУЧАТЕЛЯ [24]:
- Принять пакеты данных;
- Удалить из него служебную информацию;
- Скопировать данные в буфер. После полного приема всех пакетов сформировать из них исходный блок данных и отдать его приложению.
Для того, чтобы верно произвести все эти операции и нужен единый свод правил, то есть эталонная модель OSI. Вернемся к уровням OSI. Их принято отсчитывать в обратном порядке и в верхней части таблицы располагаются сетевые приложения, а в нижней — физическая среда передачи информации. По мере того, как данные от компьютера спускаются вниз непосредственно к сетевому кабелю, протоколы, работающие на разных уровнях, постепенно их преобразовывают, подготавливая к физической передаче.
Разберем их подробнее.
- Прикладной уровень (Application Layer) Его задача забрать у сетевого приложения данные и отправить на 6 уровень.
- Уровень представления (Presentation Layer) Переводит эти данные на единый универсальный язык. Дело в том, что каждый компьютерный процессор имеет собственный формат обработки данных, но в сеть они должны попасть в 1 универсальном формате — именно этим и занимается уровень представления.
- Сеансовый уровень (Session Layer) У него много задач. Установить сеанс связи с получателем. ПО предупреждает компьютер-получатель о том, что сейчас ему будут отправлены данные. Здесь же происходит распознавание имен и защита: идентификация — распознавание имен аутентификация — проверка по паролю регистрация — присвоение полномочий Реализация того, какая из сторон осуществляет передачу информации и как долго это будет происходить. Расстановка контрольных точек в общем потоке данных для того, чтобы в случае потери какой-то части легко было установить, какая именно часть потеряна и следует отправить повторно. Сегментация — разбивка большого блока на маленькие пакеты.
- Транспортный уровень (Transport Layer) Обеспечивает приложениям необходимую степень защиты при доставке сообщений. Имеется две группы протоколов: Протоколы, которые ориентированы на соединение — они отслеживают доставку данных и при необходимости запрашивают повторную отправку при неудаче. Это TCP — протокол контроля передачи информации. Не ориентированные на соединение (UDP) — они просто отправляют блоки и дальше не следят за их доставкой.
- Сетевой уровень (Network Layer) Обеспечивает сквозную передачу пакета, рассчитывая его маршрут. На этом уровне в пакетах ко всей предыдущей динформации, сформированной другими уровнями, добавляются IP адреса отправителя и получателя. Именно с этого момент пакет данных называется собственно ПАКЕТОМ, у которого есть IP адреса (IP протокол — это протокол межсетевого взаимодействия) [25]
- Канальный уровень (Data Link Layer) Здесь происходит передача пакета в пределах одного кабеля, то есть одной локальной сети. Он работает только до пограничного маршрутизатора одной локальной сети. К полученному пакету канальный уровень добавляет свой заголовок — MAC адреса отправителя и получателя и в таком виде блок данных уже называется КАДРОМ.
При передачи за пределы одной локальной сети пакету присваивается MAC не хоста (компьютера), а маршрутизатора другой сети. Отсюда как раз появляется вопрос серых и белых IP, о которых шла речь в статье, на которую была выше дана ссылка. Серый — это адрес внутри одной локальной сети, который не используется за ее пределами. Белый — уникальный адрес во всем глобальном интернете. При поступлении пакета на пограничный роутер IP пакета подменяется на IP этого роутера и вся локальная сеть выходит в глобальную, то есть интернет, под одним единственным IP адресом. Если адрес белый, то часть данных с IP адресом не изменяется.
Физический уровень (Transport layer) Отвечает за преобразование двоичной информации в физический сигнал, который отправляется в физический канал передачи данных. Если это кабель, то сигнал электрический, если оптоволоконная сеть, то в оптический сигнал. Осуществляется это преобразование при помощи сетевого адаптера.
1.3 Стеки протоколов
Стеки протоколов TCP/IP — это стек протоколов, который управляет передачей данных как в локальной сети, так и в глобальной сети Интернет. Данный стек содержит 4 уровня, то есть по эталонной модели OSI каждый из них объединяет в себе несколько уровней (рисунок 11) [26].
Прикладной (по OSI — прикладной, представления и сеансовый)/
За данный уровень отвечают протоколы:
TELNET — удаленный сеанс связи в виде командной строки
FTP — протокол передачи файлов SMTP — протокол пересылки почты
POP3 и IMAP — приема почтовых отправлений
HTTP — работы с гипертекстовыми документами
- Транспортный (по OSI то же самое) — это уже описанные выше TCP и UDP.
- Межсетевой (по OSI — сетевой) — это протокол IP
- Уровень сетевых интерфейсов (по OSI — канальный и физический)За работу этого уровня отвечают драйверы сетевых адаптеров.
Дипломные работы на тему безопасность дорожного движения
1. Расчет основных показателей безопасности автотранспортного средства.
1.1. Активная безопасность.
1.1.1. Габаритные и весовые параметры автомобиля.
1.1.2. Тяговая динамичность.
1.1.3. Тормозная динамичность.
1.1.7. Оборудование рабочего места водителя.
1.2. Пассивная безопасность.
1.3. Послеаварийная безопасность.
1.4. Экологическая безопасность.
2. Подушка безопасности автомобиля ВАЗ.
2.1. Предлагаемые мероприятия по созданию автомобиля оборудованными
Список использованных источников.
Введение
Возрастание интенсивности автомобильного движения в условиях сложившейся в нашей стране дорожной сети выдвигает ряд проблем, связанных с разработкой мероприятий по обеспечению максимальной производительности и безопасности автомобильного транспорта. Как показывают результаты исследований, проведенных у нас и за рубежом, в основу решения данных проблем должно быть положено обеспечение нормальных условий для функционирования системы водитель- автомобиль-дорога-среда, т. е. обеспечение надежной связи водителя с управляемым автомобилем, с дорогой, на которой осуществляется движение и внешней средой исследующая надежность автомобиля и его работу в различных климатических условий. Работы по повышению безопасности движения в настоящее время ведутся в двух направлениях: во-первых, определяются условия, при которых не возможно возникновение дорожно-транспортного происшествия (ДТП), и разрабатывается комплекс требований, при соблюдении которых создаются эти условия; во-вторых, изыскиваются возможности, позволяющие максимально снизить тяжесть последствий ДТП, сохранить жизнь водителю и пассажирам. Первое направление получило название работы по активной безопасности, второе — работы по пассивной безопасности автомобильного транспорта.
Во всех странах мира с высоким уровнем автомобилизации ведутся интенсивные научно-исследовательские и опытно-конструкторские работы в области создания безопасного автомобиля.
Число жертв на автомобильных дорогах с каждым годом увеличивается. При правительствах многих стран созданы общегосударственные органы безопасности движения, проводится большая исследовательская работа по совершенствованию конструкции автомобилей, улучшению качества дорог и организации движения, профессиональному отбору водителей и их подготовке.
В настоящее время в результате научных исследований выбраны основные положения, принципы и рекомендации по безопасности движения. Эффективность многих рекомендаций проверена на практике. Однако подавляющее их большинство относится лишь к первому звену системы автомобиль — человек — дорога — среда (А-Ч-Д-С) — к автомобилю. Но вопросы безопасности автомобильного движения нельзя решать, ограничиваясь только улучшением конструкции автомобиля, без учета взаимодействия всех компонентов системы А-Ч-Д-С. Кроме того, все мероприятия по безопасности движения необходимо рассматривать в двух аспектах: с точки зрения активной и пассивной безопасности.
1. Расчет показателей безопасности автотранспортного средства
1.1. Активная безопасность
Для количественной характеристики активной безопасности применяют как широко распространенные показатели: минимальный тормозной путь, максимальное замедление, критические скорости по условиям заноса и опрокидывания и т.п.; так и новые показатели, специфические только для данного аспекта безопасности.
На активную безопасность автомобиля влияют следующие факторы:
— компоновочные параметры автомобиля (габаритные и весовые);
— оборудование рабочего места водителя, его соответствие требованиям эргономики.
1.1.1. Габаритные и весовые параметры автомобиля
К габаритным параметрам автомобиля относятся длина La, ширина Ba, высота Ha и база L, т. е. расстояние между передней и задней осями, к весовым
— полный вес автомобиля Ga, вес, приходящийся соответственно на передний G1 и задний G2 мосты.
При движении автомобиль подвергается воздействию различных случайных возмущений, стремящихся изменить характер движения. Вследствие этого даже на строго прямолинейных участках дороги автомобиль движется не прямолинейно, а по кривым больших радиусов. При этом значительную часть времени он находится под углом к оси дороги, и размер полосы, потребной для его движения, — динамический коридор, превышает его габаритную ширину. Ширина динамического коридора зависит от размеров автомобиля и его скорости (рисунок 1).
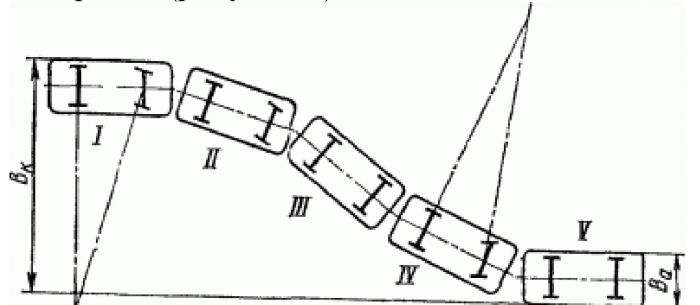
Рисунок 1- Динамический коридор на прямолинейном участке дороги.
Эмпирическая зависимость между габаритной шириной автомобиля Ва,
скоростью его движения v и шириной динамического коридора Вк имеет следующий вид:
где v — в м/с, а Ва — в м.
В = 0,054 *17,721 +1,65 + 0,3 = 1,95 м
Ширина динамического коридора, необходимая для безопасного движения автомобилей с высокими скоростями, иногда значительно превышает ширину полосы движения, установленную Строительными нормами и правилами (СНиП). СНиП предусматривают для дорог с интенсивностью движения свыше 3000 автомобилей в сутки ширину полосы движения 3,75 м а для дорог с меньшей интенсивностью 3,0—3,5 м. Эти размеры не всегда обеспечивают безопасный разъезд автомобилей, поэтому водитель, чтобы избежать столкновения, вынужден снижать скорость.
![]()
Рисунок 2 — Динамический коридор на криволинейном участке дороги.
Более заметно влияние геометрических параметров автомобиля на безопасность при криволинейном движении. Хотя при крутых поворотах скорости автомобиля обычно невелики и случайные возмущения незначительны, ширина динамического коридора может быть достаточно большой. Ее можно определить по формуле (рисунок 2):
В = R — R = R — л/- (П 2 + в) ,
где RH и Re — соответственно наружный и внутренний габаритные радиусы поворота автомобиля; L’ = L + С — расстояние от заднего моста до передней части автомобиля (L — база автомобиля; С — передний свес).
L = 2,46 + 0,761 = 3,221м,
В = 4,95 -^4,95 2 — (3,221) 2 +1,65 = 2,84 м
Согласно выражению (2) при L’ &RH величина Вк может значительно
превышать Ва, что вынуждает строителей расширять полосы движения на криволинейных участках дорог. В таблице 1 приведены геометрические и весовые параметры некоторых отечественных автомобилей.
Таблица 1 — Параметры автомобиля
Геометрические параметры, м
Весовые параметры, кН
Габаритная высота На имеет значение при проезде автомобилей под путепроводами и проводами контактной сети. Чрезмерно высокие транспортные средства (например, двухэтажные троллейбусы или автобусы, полуприцепы-панелевозы или автомобили-фургоны) с высоко расположенным центром тяжести испытывают значительные угловые колебания в поперечной плоскости. При движении по неровной дороге они могут верхним углом задеть за столб или мачту.
Масса транспортного средства для безопасности движения имеет, в основном, косвенное значение. Чем больше масса автомобиля, тем труднее им управлять. Тяжелый автомобиль медленно разгоняется и останавливается. На нем трудно выполнить сложный маневр. Чем больше масса транспортного средства, тем больше динамические нагрузки на дорогу, тем меньше срок службы покрытия. Поэтому, несмотря на очевидные преимущества применения подвижного состава большой массы, во всех странах строго соблюдают ограничение осевых нагрузок и полных масс транспортных средств. В РФ все автомобили разделены на три группы:
группа А — автомобили и автопоезда дорожного типа для дорог с усовершенствованным капитальным покрытием, имеющие осевые нагрузки до 10 тонн от одиночной оси и полную массу автомобиля до 30 тонн, автопоезда до 38 тонн (т.е. могут эксплуатироваться по дорогам общего пользования 1, 2, 3 категорий, а при специальном усилении дорожной одежды по дорогам 4 категории);
группа В — автомобили и автопоезда дорожного типа, для всей сети дорог общего пользования и имеющие осевые нагрузки до 6 тонн от одиночной оси и полную массу одиночного автомобиля до 22 тонн, автопоезда до 34 тонн (могут эксплуатироваться по всем дорогам общего пользования);
внедорожные — это автомобили, не допускаемые к эксплуатации по дорогам общего пользования и имеющие нагрузку от одиночной оси >10 тонн.
1.1.2. Тяговая динамичность
Определение мощности двигателя
Требуемая эффективная мощность определяется:
10000 10000 v — скорость движения автомобиля Ga — вес автомобиля
Ga = 1340 • 9,81 = 13145,4 Н F — площадь лобового сопротивления автомобиля
F = В • H = 1,402 • 1,4 = 1,9628 м 2 B — колея подвижного состава Н — наибольшая высота подвижного состава
vmax — максимальная скорость подвижного состава равная 25 м/с кв — коэффициент сопротивления воздуха т]тр — КПД трансмиссии
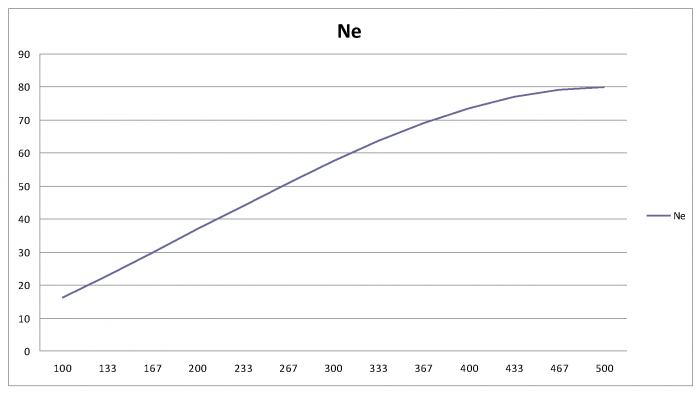
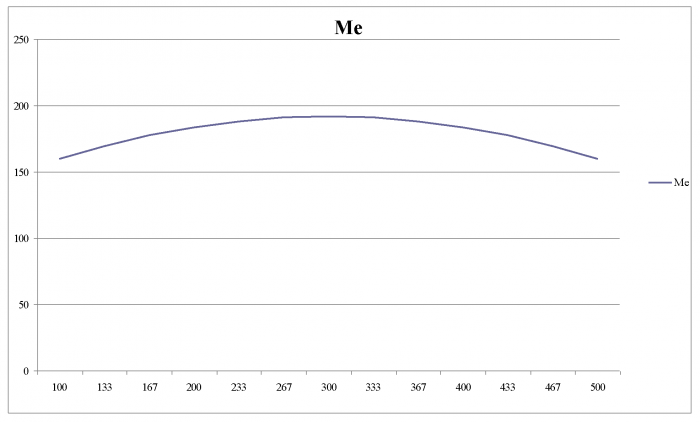
Расчет и построение внешней скоростной характеристики двигателя Наиболее полно возможности двигателя отражает внешняя скоростная характеристика двигателя, которая представляет собой зависимость мощности, крутящего момента и удельного расхода топлива от угловой скорости вращения коленчатого вала.
Установлен дизельный двигатель
®mrn = 100 с-1 ®max = 500 с-1
Для карбюратора без ограничителя принимаем:
Ne max = 1,1 • Nev = 1,1 • 79,84 = 87,824 кВт
![]()
Построение тяговой характеристики:
Подбираем шину Кама EVRO 127, который имеет следующие показатели:
Размер — 175/70R13 Ширина профиля — 177 мм Наружный диаметр — 584 мм Статический радиус — 263 мм
Указанные размеры даны в миллиметрах, в соответствии с этим рассчитываем радиус качения колеса по следующей формуле:
rk = (D / 2 + х • В • Л) • 0,001мм где D — посадочный размер;
В — ширина профиля шины;
x — принимаем для грузовых автомобилей равным 1
Л — коэффициент деформаций шины под воздействием вертикальной нагрузки и крутящего момента. Принимаем для радиальных шин равным 0,92.
Определяем мощность на колесе по формуле:
р = М е • imp • Лтр / r k , кН где imp — передаточное число трансмиссии
i mp = i Kn • i 0 = 0,784 • 6,28 = 4,92
i0 — передаточное отношение главной передачи
где comax — максимальная угловая скорость вращения коленчатого вала;
КП^ — минимальное передаточное число коробки передач vmax — максимальная скорость, развиваемая на высшей передаче rk — радиус качения колеса
Динамическая характеристика автомобиля
Динамическим фактором по тяге называется отношение разности тяговой силы и силы сопротивления воздуха к весу подвижного состава:
где Pt — тяговая сила;
Pb — сила сопротивления воздуха;
G — вес автомобиля.
Динамической характеристикой подвижного состава называется зависимость динамического фактора по тяге от скорости на различных передачах.
Сила сопротивления воздуха:
Р ь = k • F • v2 (24)
где k — коэффициент сопротивления воздуха, Нс /м ;
F — площадь лобового сопротивления автомобиля, м 2 ; v — скорость движения автомобиля, км/ч.
Динамический фактор автомобиля соответствует дорожному сопротивлению, характеризуемому коэффициентом сопротивления дороги ¥, которое автомобиль способен преодолеть на данной передаче с заданной постоянной скоростью. В случае, если величина динамического фактора
автомобиля отличается от коэффициента сопротивления дороги, по которой
он движется, то это движение будет ускоренным (при D > ¥), либо
(замедления) определяется по формуле:
g ? j = — • (D — v м/с (25)
где g — ускорение свободного падения, м/с2;
° вр — коэффициент учета вращающихся масс автомобиля;
D — динамический фактор;
V — коэффициент сопротивления дороги.
О вр = 1 + а 1 • i + а 2 (26)
где а1 ,а2 — распределение нагрузки между передней и задней осью;
ik — передаточное отношение передачи.
Принимаем значения G по таблице 3.
Таблица 3- Зависимость G от типа автомобилей
Определение времени и пути разгона:
Время и путь разгона автомобиля до максимальной скорости являются самыми распространенными и наглядными характеристиками динамичности автомобиля. Их определение производят графоаналитическим способом с использованием графика ускорений автомобиля. При проведении расчетов полагаем, что разгон автомобиля на каждой передаче производится до достижения двигателем максимальных оборотов.
Кривые ускорений автомобиля, начиная с первой передачи, разбиваем на 6 интервалов скоростей (прилож. А). Для каждого интервала скоростей определяем среднее ускорение и изменение скорости в пределах интервала.
Предполагаем, что внутри интервала подвижной состав передвигается с постоянным средним ускорением, тогда время прохождения первого участка:
где t1 I — время прохождения первого участка, сек; v1 — скорость в конце участка, м/с; v! — скорость в начале участка, м/с; j1 — ускорение в начале участка, м/с 2 ;
jH — ускорение в конце участка, м/с 2 .
То же самое рассчитываем на остальных участках каждой передачи.
При переключении передачи происходит падение скорости, величина которой зависит от дорожных условии, скорости движения и параметров обтекаемости:
Av = 33 • tn • щ, м/с (28)
где ^ — время переключения передачи. Зависит от типа двигателя,
коробки передач и квалификации водителя.
Путь проходимый автомобилем за время переключения передачи:
AS l / = t П • V k (30)
Результаты вычислении заносим в таблицу 5.
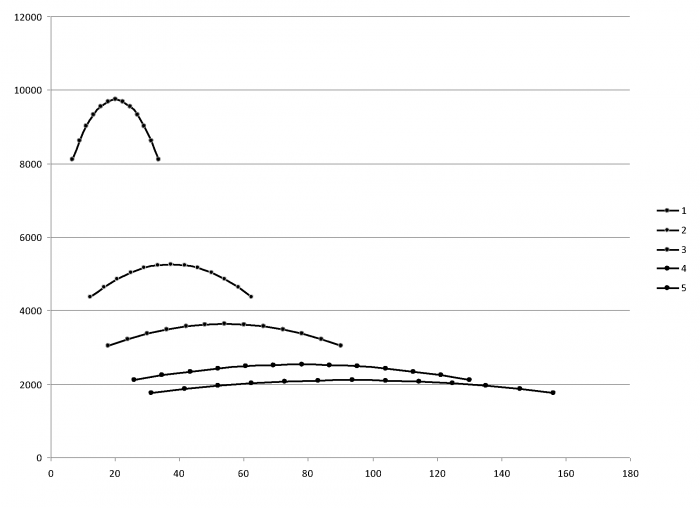
Рисунок 6 — График пути
1.1.3. Тормозная динамичность
Оценочными показателями тормозной динамичности автомобиля служат среднее замедление за период полного торможения и путь автомобиля от начала воздействия водителя на орган управления до остановки, т. е. за время ^ + tn + ?уст, где tc — время запаздывания тормозной системы; tn — время нарастания замедления; tyCT — интервал времени, в котором замедление постоянно.
В курсовой работе необходимо рассчитать минимально возможный тормозной путь (на горизонтальной дороге с асфальто- или цементобетонным покрытием, с полностью исправной тормозной системой, при 90%-ной глубине рисунка протектора шин), если начальная скорость автомобиля v0 составляет 60 км/ч.
Время tp — время реакции водителя — обычно находится в пределах 0,32,5 с. Оно зависит от квалификации водителя, его возраста, степени утомления и других факторов.
Время tc (время запаздывания тормозной системы) необходимо для устранения зазоров в соединениях тормозного привода и перемещения всех его деталей. Это время, зависящее от конструкции и технического состояния тормозного привода, колеблется в среднем от 0,2-0,3 с (гидравлический привод) до 0,6-0,8 с (пневматический привод). У автопоездов с пневматическим приводом тормозных механизмов оно может достигать 2-3 с. В течение времени (tp+ tc) автомобиль продолжает двигаться равномерно с начальной скоростью v0. В конце этого периода возникают тормозные силы, вызывающие замедление движения.
Продолжительность периода tn находим из выражения:
где b и Иц — расстояния соответственно от центра тяжести автомобиля до заднего моста и до поверхности дороги, м;
G — вес автомобиля, Н;
фх — коэффициент сцепления; для сухого асфальто- и цементобетонного покрытия он составляет 0,7-0,8;
L — база автомобиля;
К1 — скорость нарастания тормозных сил; для тормозных систем с гидроприводом она равна 15-30 кН/с, с пневмоприводом 25-100 кН/с.
14028,3 * 0,75 * (1,430 + 0,723 * 0,75) л
В заключительном периоде торможения, когда колеса обоих мостов заблокированы, установившееся замедление
где g — ускорение свободного падения.
J уст = 9,81 * 0,75 = 7,357 м/с;
Если известны tc, tK и _уусх, то тормозной путь можно рассчитать
следующим образом. Предположим, что в течение времени tn автомобиль
движется равнозамедленно с замедлением, равным 0,5/уст. При полном использовании сцепления всеми колесами автомобиля замедление определяют по формуле (6), тогда полный тормозной путь
мощность тормозных механизмов недостаточна для доведения передних колес до юза, то справедливы выражения (7), (8), однако время гя следует определять по формуле:
^ н = R x1max / K 1 ’
где Rximax — максимальная касательная реакция на колесах переднего моста, находится из справочных данных для конкретной модели автотранспортного средства.
Установившееся замедление в этом случае определяется не по формуле (6), а выражением:
где а — расстояние соответственно от центра тяжести автомобиля до переднего моста.
1.1.4. Устойчивость
Оценочными показателями устойчивости, определяемыми в данной курсовой работе, являются: скорость убук, максимально допустимая при прямолинейном движении автомобиля без пробуксовки ведущих колес;
максимально возможная (критическая) скорость уопр, с которой можно вести автомобиль без угрозы опрокидывания; максимально допустимый (критический) угол ропр косогора, по которому автомобиль может двигаться
без опрокидывания; максимальный угол подъема абук, при котором возможно равномерное движение автомобиля без буксования ведущих колес.
Скорость убук [м/с], максимально допустимая при прямолинейном движении автомобиля по горизонтальной дороге без пробуксовки ведущих колес, определяется на каждой передаче (с учетом найденного ранее по формуле (4) максимального ускорения jmax):
Скорость Убук уменьшается при уменьшении коэффициента сцепления, росте сопротивления дороги, а также при увеличении ускорения. Поэтому потеря курсовой устойчивости автомобилем наиболее вероятна на участках дороги со скользким неровным покрытием (укатанный снег, обледенелый асфальтобетон, булыжник) и подъемами. Если при прохождении подъема «с ходу» встретится участок, покрытый снежной или ледяной коркой, то даже небольшая поперечная сила может вызвать боковое скольжение заднего моста.
Поперечную устойчивость при криволинейном движении характеризует максимально возможная (критическая) скорость Уопр, с которой можно вести автомобиль без угрозы опрокидывания по горизонтальному участку.
Рассмотрим схему движения автомобиля на повороте (рисунок 3). Примем для простоты, что автомобиль является плоской фигурой, а увод и скольжение колес отсутствуют. Мгновенный центр О скоростей (центр поворота) автомобиля располагается в точке пересечения перпендикуляров к векторам скоростей средних точек мостов. При отсутствии увода и скольжения колес вектор скорости середины заднего моста параллелен плоскостям задних колес, поэтому точка О находится на продолжении оси заднего моста.
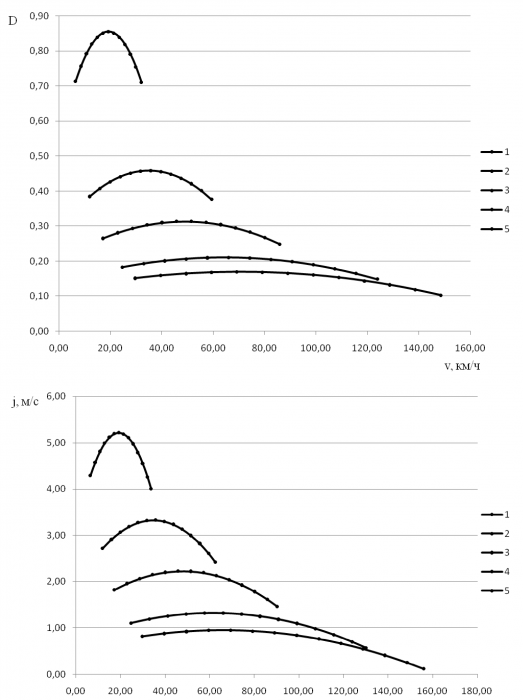
Рисунок 3 — Схема поворота автомобиля.
Скорость Уопр определяем по формуле:
vonp =V BgR / ( 2h ,), (l 0 )
где 0 — угол поворота управляемых колес (в курсовой работе принимается менее 0,349 рад);
R — расстояние от точки О до середины заднего моста; при 0 1.1.5. Управляемость
Управляемостью называют способность автомобиля устойчиво сохранять заданное направление движения и вместе с тем быстро изменять его при воздействии водителя на рулевое управление.
Поворачиваемостью называют свойство автомобиля изменять направление движения без поворота управляемых колес. Есть две основных причины поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и поперечный крен кузова, связанный с эластичностью подвески. Соответственно различают шинную и креновую поворачиваемость автомобиля.
При наличии увода автомобиль может двигаться криволинейно, даже если угол поворота управляемых колес равен 0. Кривизна траектории зависит от соотношения 51 и 52 (углы увода переднего и заднего мостов).
Если 51 = 52, то шинную поворачиваемость автомобиля называют нейтральной. Хотя при этом траектория движения автомобиля о жесткими шинами не совпадает о траекторией движения автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в этих случаях занимают различные положения.
Если 51 > 52, то для движения автомобиля с эластичными шинами по кривой управляемые колеса нужно повернуть на больший угол, чем при жестких шинах. В этом случае шинную поворачиваемость автомобиля называют недостаточной. Автомобиль с недостаточной шинной поворачиваемостью устойчиво сохраняет прямолинейное направление движения.
Если угол 51 Читать статью Рисунки по теме ПДД в детских садах – безопасность глазами детей
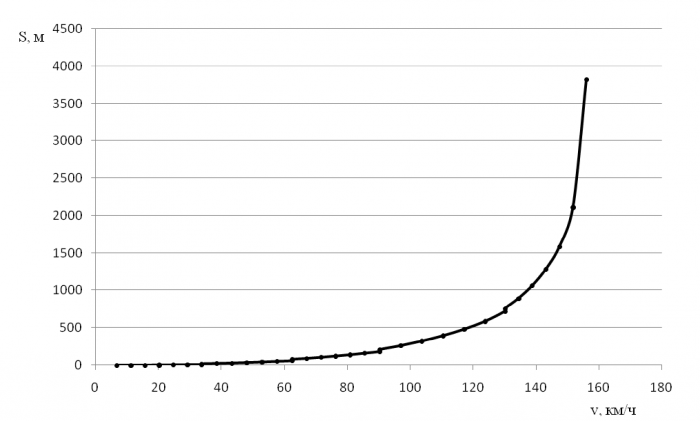
Рисунок 5 — Схемы движения автомобилей с независимой рычажной подвеской, имеющих различную креновую поворачиваемость
Для обеспечения недостаточной поворачиваемости автомобиля необходимо, чтобы угол увода переднего моста был больше угла увода заднего моста. Поэтому у легковых автомобилей наиболее распространена передняя независимая подвеска на двух рычагах. Заднюю подвеску выполняют зависимой или же независимой на одном поперечном рычаге. Никогда не применяют однорычажную подвеску для переднего моста и двухрычажную для заднего, так как это приводит к резкому ухудшению управляемости автомобиля.
Автомобиль может утратить управляемость вследствие поперечного проскальзывания шин по дороге, а также увода шин.
При повышении скорости автомобиля углы увода также возрастают. При этом у автомобиля с излишней шинной поворачиваемостью угол 52 увеличивается быстрее угла 51. При критической скорости автомобиль начинает двигаться криволинейно, хотя его управляемые колеса находятся в нейтральном положении. Следовательно, автомобиль с излишней шинной поворачиваемостью теряет управляемость, если его скорость больше критической. У автомобиля с недостаточной или нейтральной шинной поворачиваемостью критическая скорость отсутствует.
Чтобы обеспечить недостаточную шинную поворачиваемость автомобиля, несколько уменьшают давление воздуха в шинах передних колес по сравнению с давлением в шинах задних колес. Кроме того, центр тяжести автомобиля немного смещают в сторону переднего моста, что увеличивает часть центробежной силы, действующую на управляемые колеса.
1.1.6. Информативность
Информативность — это свойство автомобиля обеспечивать участников движения информацией, необходимой для динамического функционирования системы ВАДС. Информативность является одним из эксплуатационных свойств автомобиля, определяющих его безопасность.
Все участники дорожного движения условно могут быть разбиты на две группы: водители-операторы и другие (внешние) участники движения (пешеходы, водители других транспортных средств, регулировщики). В процессе дорожного движения водитель выступает в двух качествах одновременно: водителя-оператора и внешнего участника движения, и должен реагировать на информацию, исходящую как от управляемого им автомобиля
— внутренняя информативность, так и от других транспортных средств -внешняя информативность.
Информативность автомобиля может быть визуальной (форма и размеры автомобиля, цвет кузова, система автономного освещения, светосигнальное оборудование, элементы щитка приборов, параметры обзорности), звуковой (звуковые сигнализаторы, несущая волна, шум двигателя, трансмиссии и т.д.), тактильной (реакция органов управления на действие водителя).
1.1.7. Оборудование рабочего места водителя
Рабочее место водителя автомобиля характеризуется размерами кабины, удобством доступа к органам управления, положением сиденья, расположением по отношению к нему органов управления и эргономическими параметрами среды в кабине (шум, вибрации, микроклимат, загрязнение воздуха токсическими веществами).
Рациональная организация рабочего места имеет большое значение для безопасности движения, повышения производительности труда и сохранения здоровья водителя. Она заключается в оснащении, оборудовании и планировке рабочего места в соответствии с психофизиологическими и антропометрическими характеристиками человека. Вследствие этого рабочее место водителя может быть в различной степени удобным для управления автомобилем и по-разному влиять на работоспособность и утомляемость водителя, и точность управления автомобилем.
Эксплуатационное свойство, характеризующее рабочее место водителя (пассажира) автомобиля, называют обитаемостью или комфортностью автомобиля. Под обитаемостью понимают приспособленность рабочего места водителя (пассажира) к психофизиологическим и антропометрическим особенностям человека. Обитаемость относится к одному из свойств, характеризующих эксплуатационное качество автомобиля — его безопасность.
1.2. Пассивная безопасность
Различают внутреннюю пассивную безопасность, снижающую травматизм пассажиров, водителя и обеспечивающую сохранность грузов, перевозимых автомобилем, и внешнюю безопасность, которая уменьшает возможность нанесения повреждений другим участникам движения.
Конструктивные мероприятия, улучшающие внутреннюю пассивную безопасность, предусматривают снижение инерционных перегрузок в процессе удара, ограничение перемещения людей в салоне, устранение травмоопасных деталей, закрепление багажа и инструмента.
При столкновениях и наездах внешнюю пассивную безопасность обеспечивают прежде всего бамперы. Кроме того, применяются защитные рамки.
Процесс удара обычно разделяют на три фазы. В течение первой фазы соударяющиеся тела, сближаясь, деформируются, их кинетическая энергия частично переходит в потенциальную, а частично затрачивается на разрушение, перемещение и нагрев деталей. Во второй фазе накопленная потенциальная энергия, снова превращается в кинетическую, и тела начинают расходиться. В течение третьего периода тела не контактируют, их энергия расходуется на преодоление внешнего сопротивления. Согласно опытам НАМИ, при наезде автомобиля на неподвижное препятствие длительность первой фазы составляет 0,05-0,1 с, а второй 0,02-0,04 с.
Характер и тяжесть травмы зависят от многих причин: вида ДТП, скорости и конструкции автомобиля, наличия защитных приспособлений, возраста и здоровья человека. В среднем человек может выдержать без вреда кратковременную (в течение 0,01-0,1 с) перегрузку 40-50g. Перегрузки, испытываемые водителем и передним пассажиром при встречных столкновениях автомобилей, достигают 150-200g. Усилия, действующие на отдельные части тела, могут превышать 10 кН, что объясняет высокую смертность при некоторых ДТП.
Большое значение для определения параметров пассивной безопасности имеет среднее замедление ]ср. Оно определяется по формуле:
где v — скорость автомобиля непосредственно перед ударом, м/с;
sa — остаточная деформация автомобиля, которая при ударе о поверхность,
сравнимую по площади с лобовой площадью автомобиля, составляет:
легковые автомобили с несущим кузовом. 0,40-0,90 м
легковые автомобили с рамным основанием. 0,20-0,40 м
грузовые автомобили и автобусы. 0,15-0,30 м
Jp = 16,66 2 /(2*0,4) * 35 g Jp = 16,66 2 /(2*0,9) * 16 g
Автомобиль, врезается в бетонную стенку на скорости 60 км/ч (16,66
Перегрузка, действующая на пассажиров, составит 35 g, то есть незафиксированного ремнем человека, весящего 75 кг, ударит о приборную доску с силой в 2624 кг.
1.3. Послеаварийная безопасность
Послеаварийная безопасность — это свойство автомобиля уменьшать тяжесть последствий ДТП после остановки и предотвращать возникновение новых ДТП. К элементам послеаварийной безопасности автомобиля относятся конструктивные мероприятия и дополнительные приборы, предотвращающие возникновение опасных явлений, возникающих в результате ДТП.
Опасными явлениями, которые могут возникнуть в результате ДТП, следует, считать пожар, заклинивание дверей, заполнение водой салона автомобиля, если он затонул.
Требования к пожарной безопасности автомобиля и соответствующим элементам его конструкции регламентируются Правилами № 34-01 ЕЭК ООН. Этот документ регламентирует утечку топлива из топливного бака, заливной горловины и топливопроводов при фронтальном наезде автомобиля на препятствие со скоростью 13,9 м/с или наезде сзади со скоростью 10 м/с; утечка топлива в момент наезда не должна превышать 28 г/мин, а образование каплеобразной смеси также 28 г/мин. В ходе испытаний определяется объем жидкости, заменяющей топливо и вытекшей из бака при нарушении его герметичности, оценивается вероятность возникновения пожара и возможность его тушения имеющимися на автомобиле средствами.
Конструкции автомобилей массового производства должны отвечать следующим требованиям в отношении пожарной безопасности:
1) Предусматривается установка огнестойкой перегородки между топливным баком и пассажирским салоном. Элементы системы питания должны быть защищены от коррозии и предохранены от соприкосновения с
препятствиями на грунте. Все топливопроводы должны располагаться в защищенных местах (но не в салоне автомобиля); они не должны подвергаться каким-либо механическим воздействиям. Топливный бак следует изготовлять из огнестойкого материала; он не должен заряжаться статическим электричеством.
2) Заливная горловина не должна располагаться в салоне, багажнике или моторном отсеке и выступать над поверхностью кузова; крышка горловины должна быть огнестойкой.
3) Электропроводку следует размещать в специальных каналах или крепить к корпусу; она должна быть защищена от коррозии.
4) Для предотвращения быстрого распространения пламени и образования в салоне ядовитых газов (продуктов сгорания) регламентируются свойства материалов для внутренней отделки салона.
Кроме того, для повышения пожарной безопасности автомобилей на них устанавливают автоматически включающиеся огнетушители (как правило, пенные); штатные пенные или порошковые огнетушители; устройства, автоматически размыкающие электроцепь автомобиля при возникновении перегрузок определенной величины; устройства для автоматического впрыскивания в топливный бак веществ, превращающих бензин в трудносгораемое вещество (композиции галогенов, кремниевые соединения, специальные смолы).
В отношении заклинивания дверей автомобилей можно применять Правила № 11-02 ЕЭК ООН «Прочность замков и петель боковых дверей”. Однако следует учитывать, что если применяются дополнительные устройства, повышающие надежность замка в исправном состоянии (блокираторы дверей), то открыть дверь в деформированном виде, скорее всего, будет труднее. В ходе испытаний автомобиля на удар проверяется, чтобы двери (по одной с каждой стороны) открывались без применения инструмента.
Облегчение эвакуации людей из салона автомобиля, особенно автобуса, может быть достигнуто следующими мероприятиями:
— устройством запасных выходных люков в крыше автобуса (автомобиля);
— устройством запасных выходных люков в боковых стенках автобуса;
— снабжением дверей и люков дополнительными наружными замками и
— оборудованием салона молотками для разбивания стекол, пилами,
молотами, ножницами и другими инструментами для прорезывания
отверстий в стенках автобуса.
Предотвращение попадания воды в салон автомобиля при его затоплении пока не регламентируется международными стандартами. В какой-то мере может быть применен Российский ОСТ 37.001.248 на пылеводонепроницаемость. Единственный путь борьбы с этим явлением -повышение общей герметичности салона автомобиля. В этом направлении имеется много нерешенных вопросов. Следует отметить, что возможность спасения людей из затопленного автомобиля зависит не столько от его
конструкции (водонепроницаемости), сколько от состояния окон автомобиля (открыты или закрыты), умения людей плавать, от присутствия духа у водителя и пассажиров.
1.4. Экологическая безопасность
Экологическая безопасность — это свойство автомобиля, позволяющее уменьшать вред, наносимый участникам движения и окружающей среде в процессе его нормальной эксплуатации. Мероприятиями по уменьшению вредного воздействия автомобилей на окружающую среду следует считать снижение токсичности отработавших газов и уровня шума.
Основными загрязняющими веществами при эксплуатации автотранспорта являются:
— нефтепродукты при их испарении;
— продукты истирания шин, тормозных колодок и дисков сцепления, асфальтовых и бетонных покрытий.
Наибольший загрязняющий эффект из всего перечисленного оказывают отработавшие газы. К основным вредным компонентам отработавших газов автомобилей относятся окись углерода СО (сильное токсичное вещество), углеводороды СНх, окислы азота NOx (токсичны, вместе с углеводородами СН образует фотохимический смог), альдегиды (вредно действуют на нервную систему и органы дыхания), твердые частицы (сажа), окислы серы БОх, бензапирен, соли свинца (сильно действующие токсичные вещества).
В настоящий момент в России действуют допустимые нормы по токсичности выхлопных газов Евро II (согласно Правилам №49, 83 ЕЭК ООН), введенные с 1 января 2001 г.
В Европе этот стандарт действует с 1996 г., а нормы Евро III вступают в силу с 1 октября 2001 года. Причем все они будут обязательны для российских
транспортных средств, работающих за границей. Кроме того, если российский автомобиль выпущен после октября 2001 года, то он должен удовлетворять нормам Евро III.
В Евро II регламентируемый уровень выбросов дизельных двигателей грузовых автомобилей полной массой свыше 3,5 т составляет (в г/кВт*ч): СО (окись углерода) — 4,0; СН (углеводороды) — 1,1; КОх (оксиды азота) — 7,0; РМ (твердые частицы) — 0,15.
В Евро III требования к токсичности выхлопа ужесточаются -регламентируемый уровень выбросов дизельных двигателей грузовых автомобилей полной массой свыше 3,5 т составит (в г/кВт*ч): СО (окись углерода) — 2,0; СН (углеводороды) — 0,6; КОх (оксиды азота) — 5,0; РМ (твердые частицы) — 0,1. Для бензиновых двигателей легковых автомобилей уровень выбросов в г/км: CO — 2,3; CH — 0,2; NOx — 0,15.
При движении автомобиля шум создается двигателем внутреннего сгорания, шасси автомобиля (в основном механизмами трансмиссии и кузовом) и в результате взаимодействия шин с дорожным покрытием.
У технически исправного легкового автомобиля, имеющего небольшой пробег, основной источник шума — взаимодействие шин с дорожным покрытием, у грузового автомобиля шум шин составляет меньшую долю. В результате взаимодействия колеса с дорожным покрытием возникает шум, уровень и характеристики которого зависят от типа автомобиля, конструкции подвески, рисунка протектора, нагрузки на шину, ее жесткости и давления в ней.
Шум от работы двигателя внутреннего сгорания возникает во впускном тракте карбюратора и трубопроводе; в газораспределительном клапанном механизме в результате взаимодействия толкателей с клапанами; в зубчатых, а также в цепных и ременных передачах между коленчатым и распределительным валами; в системе охлаждения двигателя вследствие работы вентилятора, ременной передачи и водяного насоса; в выпускной системе. Шум возникает также в зубчатых зацеплениях коробки передач и ряде других второстепенных (по шуму) механизмов.
В элементах шасси технически исправного (нового) автомобиля и его кузове шум создается при работе механизмов трансмиссии элементах подвески и в результате обтекания кузова воздушным потоком при движении.
Шум, создаваемый отдельным автомобилем (автопоездом), регламентируется рядом нормативных документов, основными из которых являются Правила № 9 ЕЭК ООН. Шум выпускаемых отечественной автомобильной промышленностью транспортных средств в основном соответствует этим нормам.
2. Подушка безопасности автомобиля ВАЗ
Подушка, безопасности — система пассивной безопасности (SRS, Supplementary Restraint System) в транспортных средствах.
Представляет собой эластичную оболочку, которая наполняется воздухом либо другим газом. Подушки безопасности широко используются для смягчения удара в случае автомобильного столкновения.
Пневмоподушка дополняет ремень безопасности, уменьшая шанс удара головы и верхней части тела пассажира о какую-либо часть салона автомобиля. Также они снижают опасность получения тяжелых травм, распределяя силу удара по телу пассажира.
«Недавно проведенное исследование показало, что более чем 6.000 жизней было спасено благодаря подушкам безопасности».
Стандартные плечевые ремни безопасности были фактически убраны в автомобилях выпуска 70-х, оснащенных подушками безопасности, которые были призваны заменить ремни при лобовых столкновениях. Подушка. безопасности на стороне пассажира была расположена в нижней части панели, что позволяло ей также защищать колени пассажира. Нижняя часть панели на водительском месте также отличалась своей выпуклостью.
Дженерал Моторз назвала свою систему ACRS (Air Cushion Restraint System). Она включает в себя боковую подушку безопасности для пассажира в автомобилях выпуска 70-х и предусматривает двухступенчатое развертывание как и более поздние системы.
Принцип действия основывается на использовании простого акселерометра, инициирующего химическую реакцию в специальном баллончике. В результате реакции происходит быстрое наполнение газом нейлоновой подушки, которая уменьшает перегрузку, испытываемую пассажиром в момент резкой остановки при столкновении. Подушка также имеет небольшие вентиляционные отверстия, которые используются для относительно медленного стравливания газа после удара пассажира об неё.
Фронтальные подушки безопасности не должны развертываться при боковом ударе, ударе в заднюю часть либо перевороте автомобиля. Из-за того, что подушки безопасности срабатывают лишь раз и затем быстро сдуваются, они бесполезны при последующем столкновении. Ремни безопасности помогают снизить риск получения тяжелых травм во многих случаях. Они способствуют правильному расположению пассажира в кресле для максимизации эффективности подушки безопасности, а также защищают пристегнутых пассажиров при первом и последующих столкновениях. Таким образом, жизненно необходимо пристегиваться, даже в машинах, оборудованных подушками безопасности.
Хотя в 60-х и 70-х годах они рекламировались как потенциальная замена ремней, в нынешнее время подушки безопасности продаются как дополнительное средство защиты. Максимально эффективно они работают вместе с ремнями безопасности. Автопроизводители пересмотрели свою точку зрения насчет замены подушками безопасности столь необходимых ремней.
Общая схема работы
Система подушек безопасности включает в себя три главных компонента:
-непосредственно сам модуль подушки безопасности
-датчики определения удара
Некоторые системы могут также иметь переключатель on/off (вкл/выкл) для отключения в случае надобности.
Модуль подушки безопасности содержит в себе блок наполнения и легкую нейлоновую подушку. Модуль водительской подушки безопасности
находится в центре рулевого колеса, а пассажира — в приборной панели. Полностью наполненная газом водительская подушка имеет примерно диаметр большого надувного пляжного мячаШаблон:НЕТ АИ. Пассажирская же может быть в два-три раза больше, так как дистанция между сидящим справа пассажиром и приборной панелью гораздо больше нежели расстояние между водителем и рулем.
Датчики удара расположены в передней части автомобиля и/или салоне. Автомобили могут быть оснащены одним и более датчиками, которые активируются под воздействием сил, возникающих при лобовом или близком к лобовому ударе. Датчики измеряют степень замедления, с которой машина сбрасывает скорость. Именно поэтому замедление автомобиля, при котором датчики активируют подушки, варьируется в зависимости от характера столкновения. Подушки безопасности не должны срабатывать при внезапном торможении или при езде по неровным поверхностям. На самом деле, максимальный уровень замедления при экстренном торможении составляет лишь незначительную часть от уровня, достаточного для приведения подушек безопасности в действие.
Блок диагностики следит за исправностью системы подушек безопасности. Он активируется при включении зажигания автомобиля. Если блок диагностики обнаружит неисправность, загорится лампочка, предупреждающая водителя о необходимости доставки автомобиля в авторизованный центр обслуживания для диагностики системы подушек безопасности. Большинство блоков диагностики имеют устройства, которые содержат достаточно электрической энергии для приведения подушек безопасности в действие, если основная аккумуляторная батарея будет быстро выведена из строя при столкновении.
Некоторые автомобили без задних сидений, такие как пикапы и кабриолеты, либо задние сидения которых слишком малы для установки детских сидений, имеют ручной переключатель on/off (вкл/выкл) для пассажира справа, установленный на заводе. Такие переключатели для водительской и пассажирской подушки безопасности могут быть установлены квалифицированным обслуживающим персоналом по запросу владельца транспортного средства, если он отвечает определенным государственным критериям и имеет разрешение.
Сперва большинство автомобилей комплектовалось лишь одной водительской подушкой безопасности (DAB), установленной в рулевом колесе и защищающей водителя (который имеет больше шансов получить травмы). На протяжении 90-х годов подушки для передних пассажиров (PAB), а затем раздельные боковые подушки (SAB), помещаемые между пассажирами и дверью, стали обычной практикой.
Подушка может серьезно ранить или даже убить непристегнутого ребенка, который сидит слишком близко к ней или же был выброшен вперед силой экстренного торможения. По мнению специалистов для безопасности ребенка необходимы следующие условия:
Дети должны перевозиться в правильно установленном и соответствующем возрасту автомобильном кресле на заднем сиденье. Внимательно изучите соответствующий раздел в инструкции к автомобилю.
Младенцы, перевозимые в кресле с задним расположением, (в возрасте до одного года и весом менее 10 кг) не должны находиться на переднем пассажирском сиденье при включенной подушке безопасности.
Если ребенок старше одного года вынужден ехать на переднем сиденье, оборудованном подушкой безопасности со стороны пассажира, то он или она должны сидеть в детском кресле ориентированном по направлению движения, или пристегнуты с использованием коленного или плечевого ремня, а сиденье должно быть отодвинуто назад насколько возможно.
Подушки безопасности для пешеходов
Разрабатываются опытные образцы подушек безопасности, расположенных снаружи автомобиля, перед ветровым стеклом.
Такие подушки раскрываются от сигнала сенсора переднего бампера и предотвращают удар головы пешехода о лобовое стекло (около 80 % смертей при столкновении).
Подушки безопасности для велосипедистов. Дизайнеры Анна Хаупт (Anna Haupt) и Тереза Алстин (Terese Alstin) из Швеции разработали прототип подушки безопасности для мотоциклистов и велосипедистов под названием Hovding, которая надувается в случае падения и предохраняет голову и шею от серьезных травм. Подушка. находится внутри водонепроницаемого тканевого чехла и в сложенном состоянии крепится вокруг шеи пилота. В момент падения подушка расскрывается за 0.1 секунду, обеспечивая защиту не хуже, чем обычный мотоциклетный шлем.
Заключение
Развитие современных видов транспорта позволяет обществу добиваться существенной экономии труда и времени, сокращать продолжительность процессов производства и обращения товаров, высвобождать время для общественно-полезной деятельности, образования и отдыха. Надземный, наземный, подземный и водный — это те виды транспорта, которые сейчас осуществляют перевозку грузов и пассажиров. Наиболее экономичным и перспективным является автомобильный транспорт, бурное развитие которого обусловлено большой подвижностью, высокой скоростью перевозки грузов, доставки грузов к адресату без промежуточных перегрузок и др.
Высокое качество современных автомобилей и автомобильных дорог, а также хорошая организация движения во многом облегчают труд водителя, уменьшают потенциальную возможность возникновения дорожнотранспортных происшествий (ДТП). Однако аварийность на автомобильных дорогах продолжает оставаться очень высокой и является подлинным бедствий во многих странах с развитым автомобильным движением. По данным Всемирной организации здравоохранения (ВОЗ) ежегодно в результате ДТП в мире погибают 1,3 млн. человек, 20-50 млн. получают травмы.
В России в практически каждый год от ДТП погибает свыше 35 тыс. человек, а увечья получают более 200 тыс. человек, причем 14 тыс. из них остались инвалидами навсегда.
Весь мир занят сейчас поисками мер борьбы с ДТП. Статистические данные последних десятилетий показывают, что в развитых странах смертность от ДТП ежегодно снижается, например в США за период с 1974 по 1998 год она уменьшилась на 27 %, а в странах с низким и среднем уровнем доходов, наоборот увеличивается. При правительствах многих стран созданы общегосударственные органы безопасности движения, проводится большая исследовательская работа по совершенствованию конструкции автомобилей, улучшению качества дорог и организации движения, профессиональному отбору водителей и их подготовке.
Дипломные работы на тему безопасность дорожного движения

Выполнено 24 работ на тему «безопасность дорожного движения»

Средняя цена 3 965 ₽ (Минимальная 2 775 ₽ , максимальная 5 154 ₽ )

Средний срок выполнения: 14 дней
Последние работы на эту тему по предмету «право и юриспруденция»
ВВЕДЕНИЕ Актуальность. Проблема обеспечения безопасности дорожного движения является одной из актуальных социально-экономических проблем нашего времени. В октябре 2012 г. на уровне Правительства РФ было официально заявлено, что безопасность дорожного движения является одной из важных социально-эк
Содержание ГЛАВА 1. ЭВОЛЮЦИЯ ОГРАНИЗАЦИОННОГО ПОСТРОЕНИЯ И ПРАВОВОГО РЕГУЛИРОВАНИЯ ДЕЯТЕЛЬНОСТИ ДОРОЖНО-ПАТРУЛЬНОЙ СЛУЖБЫ. 1.1. Становление и развитие дорожно-патрульной службы в Российской империи и СССР. 1.2. Организационно-правовое строительство дорожно-патрульной службы в современной России. 1.
Предмет: Уголовное право Введение Глава 1. Общие вопросы уголовной ответственности за нарушение ПДД и эксплуатации транспортных средств 1.Понятие и общая характеристика преступлений против безопасности движения и эксплуатации транспорта 2. Зарубежный опыт уголовной ответственности за преступления
Читать статью Какой цвет автомобиля выбрать с точки зрения практичности, безопасности, психологии
Последние работы на эту тему по предмету «безопасность жизнедеятельности»
Введение Актуальность исследования обусловлена важностью формирования культуры безопасного поведения школьников в процессе изучения правил дорожного движения. Безопасность жизни и жизнедеятельности — насущная потребность человека. Реализуясь в пространстве и времени, опасности причиняют вред здо
Разработка проекта организации дорожного движения по повышению пропускной способности и безопасности движения на пересечении пр.Победы и ул.Чайковского г.Челябинска Специальность- организация и безопасность движения
Итоговая квалификационная работа по программе: Переподготовка специалистов по безопасности дорожного движения в организациях, осуществляющих перевозку пассажиров и грузов
Последние работы на эту тему по предмету «логистика»
ВВЕДЕНИЕ Безопасность и организация движения на автомобильных дорогах представляет существенную заинтересованность во всех мировых государствах из-за значительных жертв и материальных потерь при совершении дорожно-транспортных происшествий. В Российской Федерации эта проблема остро стоит, так как
Тема работы: «Оценка уровня безопасности дорожного движения в г. Орехово — Зуево и разработка мероприятий по повышению эффективности дорожного движения». В качестве объекта для исследования, необходимо взять конкретное пересечение (регулируемый перекресток) на ул. Иванова-ул. Бирюкова. Геометриче
Здравствуйте. Диплом сделан. Осталось повысить актуальность с 46% до 55% и подправить оформление. Все что нужно описал в файле «Задачи». Оформление для бакалавриата (в методичке). Жду Вашего ответа. Нужно в ближайшее время выполнение
Привет студент
1. Расчет основных показателей безопасности автотранспортного средства.
1.1. Активная безопасность.
1.1.1. Габаритные и весовые параметры автомобиля.
1.1.2. Тяговая динамичность.
1.1.3. Тормозная динамичность.
1.1.7. Оборудование рабочего места водителя.
1.2. Пассивная безопасность.
1.3. Послеаварийная безопасность.
1.4. Экологическая безопасность.
2. Подушка безопасности автомобиля ВАЗ.
2.1. Предлагаемые мероприятия по созданию автомобиля оборудованными
Список использованных источников.
Введение
Возрастание интенсивности автомобильного движения в условиях сложившейся в нашей стране дорожной сети выдвигает ряд проблем, связанных с разработкой мероприятий по обеспечению максимальной производительности и безопасности автомобильного транспорта. Как показывают результаты исследований, проведенных у нас и за рубежом, в основу решения данных проблем должно быть положено обеспечение нормальных условий для функционирования системы водитель- автомобиль-дорога-среда, т. е. обеспечение надежной связи водителя с управляемым автомобилем, с дорогой, на которой осуществляется движение и внешней средой исследующая надежность автомобиля и его работу в различных климатических условий. Работы по повышению безопасности движения в настоящее время ведутся в двух направлениях: во-первых, определяются условия, при которых не возможно возникновение дорожно-транспортного происшествия (ДТП), и разрабатывается комплекс требований, при соблюдении которых создаются эти условия; во-вторых, изыскиваются возможности, позволяющие максимально снизить тяжесть последствий ДТП, сохранить жизнь водителю и пассажирам. Первое направление получило название работы по активной безопасности, второе — работы по пассивной безопасности автомобильного транспорта.
Во всех странах мира с высоким уровнем автомобилизации ведутся интенсивные научно-исследовательские и опытно-конструкторские работы в области создания безопасного автомобиля.
Число жертв на автомобильных дорогах с каждым годом увеличивается. При правительствах многих стран созданы общегосударственные органы безопасности движения, проводится большая исследовательская работа по совершенствованию конструкции автомобилей, улучшению качества дорог и организации движения, профессиональному отбору водителей и их подготовке.
В настоящее время в результате научных исследований выбраны основные положения, принципы и рекомендации по безопасности движения. Эффективность многих рекомендаций проверена на практике. Однако подавляющее их большинство относится лишь к первому звену системы автомобиль — человек — дорога — среда (А-Ч-Д-С) — к автомобилю. Но вопросы безопасности автомобильного движения нельзя решать, ограничиваясь только улучшением конструкции автомобиля, без учета взаимодействия всех компонентов системы А-Ч-Д-С. Кроме того, все мероприятия по безопасности движения необходимо рассматривать в двух аспектах: с точки зрения активной и пассивной безопасности.
1. Расчет показателей безопасности автотранспортного средства
1.1. Активная безопасность
Для количественной характеристики активной безопасности применяют как широко распространенные показатели: минимальный тормозной путь, максимальное замедление, критические скорости по условиям заноса и опрокидывания и т.п.; так и новые показатели, специфические только для данного аспекта безопасности.
На активную безопасность автомобиля влияют следующие факторы:
— компоновочные параметры автомобиля (габаритные и весовые);
— оборудование рабочего места водителя, его соответствие требованиям эргономики.
1.1.1. Габаритные и весовые параметры автомобиля
К габаритным параметрам автомобиля относятся длина La, ширина Ba, высота Ha и база L, т. е. расстояние между передней и задней осями, к весовым
— полный вес автомобиля Ga, вес, приходящийся соответственно на передний G1 и задний G2 мосты.
При движении автомобиль подвергается воздействию различных случайных возмущений, стремящихся изменить характер движения. Вследствие этого даже на строго прямолинейных участках дороги автомобиль движется не прямолинейно, а по кривым больших радиусов. При этом значительную часть времени он находится под углом к оси дороги, и размер полосы, потребной для его движения, — динамический коридор, превышает его габаритную ширину. Ширина динамического коридора зависит от размеров автомобиля и его скорости (рисунок 1).
Рисунок 1- Динамический коридор на прямолинейном участке дороги.
Эмпирическая зависимость между габаритной шириной автомобиля Ва,
скоростью его движения v и шириной динамического коридора Вк имеет следующий вид:
где v — в м/с, а Ва — в м.
В = 0,054 *17,721 +1,65 + 0,3 = 1,95 м
Ширина динамического коридора, необходимая для безопасного движения автомобилей с высокими скоростями, иногда значительно превышает ширину полосы движения, установленную Строительными нормами и правилами (СНиП). СНиП предусматривают для дорог с интенсивностью движения свыше 3000 автомобилей в сутки ширину полосы движения 3,75 м а для дорог с меньшей интенсивностью 3,0—3,5 м. Эти размеры не всегда обеспечивают безопасный разъезд автомобилей, поэтому водитель, чтобы избежать столкновения, вынужден снижать скорость.
![]()
Рисунок 2 — Динамический коридор на криволинейном участке дороги.
Более заметно влияние геометрических параметров автомобиля на безопасность при криволинейном движении. Хотя при крутых поворотах скорости автомобиля обычно невелики и случайные возмущения незначительны, ширина динамического коридора может быть достаточно большой. Ее можно определить по формуле (рисунок 2):
В = R — R = R — л/- (П 2 + в) ,
где RH и Re — соответственно наружный и внутренний габаритные радиусы поворота автомобиля; L’ = L + С — расстояние от заднего моста до передней части автомобиля (L — база автомобиля; С — передний свес).
L = 2,46 + 0,761 = 3,221м,
В = 4,95 -^4,95 2 — (3,221) 2 +1,65 = 2,84 м
Согласно выражению (2) при L’ &RH величина Вк может значительно
превышать Ва, что вынуждает строителей расширять полосы движения на криволинейных участках дорог. В таблице 1 приведены геометрические и весовые параметры некоторых отечественных автомобилей.
Таблица 1 — Параметры автомобиля
Геометрические параметры, м
Весовые параметры, кН
Габаритная высота На имеет значение при проезде автомобилей под путепроводами и проводами контактной сети. Чрезмерно высокие транспортные средства (например, двухэтажные троллейбусы или автобусы, полуприцепы-панелевозы или автомобили-фургоны) с высоко расположенным центром тяжести испытывают значительные угловые колебания в поперечной плоскости. При движении по неровной дороге они могут верхним углом задеть за столб или мачту.
Масса транспортного средства для безопасности движения имеет, в основном, косвенное значение. Чем больше масса автомобиля, тем труднее им управлять. Тяжелый автомобиль медленно разгоняется и останавливается. На нем трудно выполнить сложный маневр. Чем больше масса транспортного средства, тем больше динамические нагрузки на дорогу, тем меньше срок службы покрытия. Поэтому, несмотря на очевидные преимущества применения подвижного состава большой массы, во всех странах строго соблюдают ограничение осевых нагрузок и полных масс транспортных средств. В РФ все автомобили разделены на три группы:
группа А — автомобили и автопоезда дорожного типа для дорог с усовершенствованным капитальным покрытием, имеющие осевые нагрузки до 10 тонн от одиночной оси и полную массу автомобиля до 30 тонн, автопоезда до 38 тонн (т.е. могут эксплуатироваться по дорогам общего пользования 1, 2, 3 категорий, а при специальном усилении дорожной одежды по дорогам 4 категории);
группа В — автомобили и автопоезда дорожного типа, для всей сети дорог общего пользования и имеющие осевые нагрузки до 6 тонн от одиночной оси и полную массу одиночного автомобиля до 22 тонн, автопоезда до 34 тонн (могут эксплуатироваться по всем дорогам общего пользования);
внедорожные — это автомобили, не допускаемые к эксплуатации по дорогам общего пользования и имеющие нагрузку от одиночной оси >10 тонн.
1.1.2. Тяговая динамичность
Определение мощности двигателя
Требуемая эффективная мощность определяется:
10000 10000 v — скорость движения автомобиля Ga — вес автомобиля
Ga = 1340 • 9,81 = 13145,4 Н F — площадь лобового сопротивления автомобиля
F = В • H = 1,402 • 1,4 = 1,9628 м 2 B — колея подвижного состава Н — наибольшая высота подвижного состава
vmax — максимальная скорость подвижного состава равная 25 м/с кв — коэффициент сопротивления воздуха т]тр — КПД трансмиссии
Расчет и построение внешней скоростной характеристики двигателя Наиболее полно возможности двигателя отражает внешняя скоростная характеристика двигателя, которая представляет собой зависимость мощности, крутящего момента и удельного расхода топлива от угловой скорости вращения коленчатого вала.
Установлен дизельный двигатель
®mrn = 100 с-1 ®max = 500 с-1
Для карбюратора без ограничителя принимаем:
Ne max = 1,1 • Nev = 1,1 • 79,84 = 87,824 кВт
![]()
Построение тяговой характеристики:
Подбираем шину Кама EVRO 127, который имеет следующие показатели:
Размер — 175/70R13 Ширина профиля — 177 мм Наружный диаметр — 584 мм Статический радиус — 263 мм
Указанные размеры даны в миллиметрах, в соответствии с этим рассчитываем радиус качения колеса по следующей формуле:
rk = (D / 2 + х • В • Л) • 0,001мм где D — посадочный размер;
В — ширина профиля шины;
x — принимаем для грузовых автомобилей равным 1
Л — коэффициент деформаций шины под воздействием вертикальной нагрузки и крутящего момента. Принимаем для радиальных шин равным 0,92.
Определяем мощность на колесе по формуле:
р = М е • imp • Лтр / r k , кН где imp — передаточное число трансмиссии
i mp = i Kn • i 0 = 0,784 • 6,28 = 4,92
i0 — передаточное отношение главной передачи
где comax — максимальная угловая скорость вращения коленчатого вала;
КП^ — минимальное передаточное число коробки передач vmax — максимальная скорость, развиваемая на высшей передаче rk — радиус качения колеса
Динамическая характеристика автомобиля
Динамическим фактором по тяге называется отношение разности тяговой силы и силы сопротивления воздуха к весу подвижного состава:
где Pt — тяговая сила;
Pb — сила сопротивления воздуха;
G — вес автомобиля.
Динамической характеристикой подвижного состава называется зависимость динамического фактора по тяге от скорости на различных передачах.
Сила сопротивления воздуха:
Р ь = k • F • v2 (24)
где k — коэффициент сопротивления воздуха, Нс /м ;
F — площадь лобового сопротивления автомобиля, м 2 ; v — скорость движения автомобиля, км/ч.
Динамический фактор автомобиля соответствует дорожному сопротивлению, характеризуемому коэффициентом сопротивления дороги ¥, которое автомобиль способен преодолеть на данной передаче с заданной постоянной скоростью. В случае, если величина динамического фактора
автомобиля отличается от коэффициента сопротивления дороги, по которой
он движется, то это движение будет ускоренным (при D > ¥), либо
(замедления) определяется по формуле:
g ? j = — • (D — v м/с (25)
где g — ускорение свободного падения, м/с2;
° вр — коэффициент учета вращающихся масс автомобиля;
D — динамический фактор;
V — коэффициент сопротивления дороги.
О вр = 1 + а 1 • i + а 2 (26)
где а1 ,а2 — распределение нагрузки между передней и задней осью;
ik — передаточное отношение передачи.
Принимаем значения G по таблице 3.
Таблица 3- Зависимость G от типа автомобилей
Определение времени и пути разгона:
Время и путь разгона автомобиля до максимальной скорости являются самыми распространенными и наглядными характеристиками динамичности автомобиля. Их определение производят графоаналитическим способом с использованием графика ускорений автомобиля. При проведении расчетов полагаем, что разгон автомобиля на каждой передаче производится до достижения двигателем максимальных оборотов.
Кривые ускорений автомобиля, начиная с первой передачи, разбиваем на 6 интервалов скоростей (прилож. А). Для каждого интервала скоростей определяем среднее ускорение и изменение скорости в пределах интервала.
Предполагаем, что внутри интервала подвижной состав передвигается с постоянным средним ускорением, тогда время прохождения первого участка:
где t1 I — время прохождения первого участка, сек; v1 — скорость в конце участка, м/с; v! — скорость в начале участка, м/с; j1 — ускорение в начале участка, м/с 2 ;
jH — ускорение в конце участка, м/с 2 .
То же самое рассчитываем на остальных участках каждой передачи.
При переключении передачи происходит падение скорости, величина которой зависит от дорожных условии, скорости движения и параметров обтекаемости:
Av = 33 • tn • щ, м/с (28)
где ^ — время переключения передачи. Зависит от типа двигателя,
коробки передач и квалификации водителя.
Путь проходимый автомобилем за время переключения передачи:
AS l / = t П • V k (30)
Результаты вычислении заносим в таблицу 5.
Рисунок 6 — График пути
1.1.3. Тормозная динамичность
Оценочными показателями тормозной динамичности автомобиля служат среднее замедление за период полного торможения и путь автомобиля от начала воздействия водителя на орган управления до остановки, т. е. за время ^ + tn + ?уст, где tc — время запаздывания тормозной системы; tn — время нарастания замедления; tyCT — интервал времени, в котором замедление постоянно.
В курсовой работе необходимо рассчитать минимально возможный тормозной путь (на горизонтальной дороге с асфальто- или цементобетонным покрытием, с полностью исправной тормозной системой, при 90%-ной глубине рисунка протектора шин), если начальная скорость автомобиля v0 составляет 60 км/ч.
Время tp — время реакции водителя — обычно находится в пределах 0,32,5 с. Оно зависит от квалификации водителя, его возраста, степени утомления и других факторов.
Время tc (время запаздывания тормозной системы) необходимо для устранения зазоров в соединениях тормозного привода и перемещения всех его деталей. Это время, зависящее от конструкции и технического состояния тормозного привода, колеблется в среднем от 0,2-0,3 с (гидравлический привод) до 0,6-0,8 с (пневматический привод). У автопоездов с пневматическим приводом тормозных механизмов оно может достигать 2-3 с. В течение времени (tp+ tc) автомобиль продолжает двигаться равномерно с начальной скоростью v0. В конце этого периода возникают тормозные силы, вызывающие замедление движения.
Продолжительность периода tn находим из выражения:
где b и Иц — расстояния соответственно от центра тяжести автомобиля до заднего моста и до поверхности дороги, м;
G — вес автомобиля, Н;
фх — коэффициент сцепления; для сухого асфальто- и цементобетонного покрытия он составляет 0,7-0,8;
L — база автомобиля;
К1 — скорость нарастания тормозных сил; для тормозных систем с гидроприводом она равна 15-30 кН/с, с пневмоприводом 25-100 кН/с.
14028,3 * 0,75 * (1,430 + 0,723 * 0,75) л
В заключительном периоде торможения, когда колеса обоих мостов заблокированы, установившееся замедление
где g — ускорение свободного падения.
J уст = 9,81 * 0,75 = 7,357 м/с;
Если известны tc, tK и _уусх, то тормозной путь можно рассчитать
следующим образом. Предположим, что в течение времени tn автомобиль
движется равнозамедленно с замедлением, равным 0,5/уст. При полном использовании сцепления всеми колесами автомобиля замедление определяют по формуле (6), тогда полный тормозной путь
мощность тормозных механизмов недостаточна для доведения передних колес до юза, то справедливы выражения (7), (8), однако время гя следует определять по формуле:
^ н = R x1max / K 1 ’
где Rximax — максимальная касательная реакция на колесах переднего моста, находится из справочных данных для конкретной модели автотранспортного средства.
Установившееся замедление в этом случае определяется не по формуле (6), а выражением:
где а — расстояние соответственно от центра тяжести автомобиля до переднего моста.
1.1.4. Устойчивость
Оценочными показателями устойчивости, определяемыми в данной курсовой работе, являются: скорость убук, максимально допустимая при прямолинейном движении автомобиля без пробуксовки ведущих колес;
максимально возможная (критическая) скорость уопр, с которой можно вести автомобиль без угрозы опрокидывания; максимально допустимый (критический) угол ропр косогора, по которому автомобиль может двигаться
без опрокидывания; максимальный угол подъема абук, при котором возможно равномерное движение автомобиля без буксования ведущих колес.
Скорость убук [м/с], максимально допустимая при прямолинейном движении автомобиля по горизонтальной дороге без пробуксовки ведущих колес, определяется на каждой передаче (с учетом найденного ранее по формуле (4) максимального ускорения jmax):
Скорость Убук уменьшается при уменьшении коэффициента сцепления, росте сопротивления дороги, а также при увеличении ускорения. Поэтому потеря курсовой устойчивости автомобилем наиболее вероятна на участках дороги со скользким неровным покрытием (укатанный снег, обледенелый асфальтобетон, булыжник) и подъемами. Если при прохождении подъема «с ходу» встретится участок, покрытый снежной или ледяной коркой, то даже небольшая поперечная сила может вызвать боковое скольжение заднего моста.
Поперечную устойчивость при криволинейном движении характеризует максимально возможная (критическая) скорость Уопр, с которой можно вести автомобиль без угрозы опрокидывания по горизонтальному участку.
Рассмотрим схему движения автомобиля на повороте (рисунок 3). Примем для простоты, что автомобиль является плоской фигурой, а увод и скольжение колес отсутствуют. Мгновенный центр О скоростей (центр поворота) автомобиля располагается в точке пересечения перпендикуляров к векторам скоростей средних точек мостов. При отсутствии увода и скольжения колес вектор скорости середины заднего моста параллелен плоскостям задних колес, поэтому точка О находится на продолжении оси заднего моста.
Рисунок 3 — Схема поворота автомобиля.
Скорость Уопр определяем по формуле:
vonp =V BgR / ( 2h ,), (l 0 )
где 0 — угол поворота управляемых колес (в курсовой работе принимается менее 0,349 рад);
R — расстояние от точки О до середины заднего моста; при 0 1.1.5. Управляемость
Управляемостью называют способность автомобиля устойчиво сохранять заданное направление движения и вместе с тем быстро изменять его при воздействии водителя на рулевое управление.
Поворачиваемостью называют свойство автомобиля изменять направление движения без поворота управляемых колес. Есть две основных причины поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и поперечный крен кузова, связанный с эластичностью подвески. Соответственно различают шинную и креновую поворачиваемость автомобиля.
При наличии увода автомобиль может двигаться криволинейно, даже если угол поворота управляемых колес равен 0. Кривизна траектории зависит от соотношения 51 и 52 (углы увода переднего и заднего мостов).
Если 51 = 52, то шинную поворачиваемость автомобиля называют нейтральной. Хотя при этом траектория движения автомобиля о жесткими шинами не совпадает о траекторией движения автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в этих случаях занимают различные положения.
Если 51 > 52, то для движения автомобиля с эластичными шинами по кривой управляемые колеса нужно повернуть на больший угол, чем при жестких шинах. В этом случае шинную поворачиваемость автомобиля называют недостаточной. Автомобиль с недостаточной шинной поворачиваемостью устойчиво сохраняет прямолинейное направление движения.
Если угол 51 Читать статью Техника безопасности при техническом обслуживании и ремонте авто
Креновая поворачиваемость автомобиля тесно связана с шинной поворачиваемостью, так как увод колеса возникает не только под действием сил и моментов, но и при наклоне колеса к вертикали (развале). Если направление поперечной силы совпадает с направлением развала колеса, то увод возрастает. Развал колеса, равный 1°, вызывает увод на угол 10-20′. У автомобилей с независимой подвеской колес на поперечных рычагах крен кузова вызывает изменение развала колеса. При двухрычажной подвеске (рисунок 4, а) колеса наклоняются в сторону крена кузова в направлении действия поперечной силы Ру, что увеличивает угол увода моста. При однорычажной подвеске (рисунок 4, б) колеса наклоняются в сторону, противоположную крену кузова, навстречу поперечной силе. В этом случае угол увода моста уменьшается. Таким образом, в зависимости от конструкции подвески, креновая поворачиваемость может либо усиливать, либо ослаблять влияние шинной поворачиваемости.
Рисунок 5 — Схемы движения автомобилей с независимой рычажной подвеской, имеющих различную креновую поворачиваемость
Для обеспечения недостаточной поворачиваемости автомобиля необходимо, чтобы угол увода переднего моста был больше угла увода заднего моста. Поэтому у легковых автомобилей наиболее распространена передняя независимая подвеска на двух рычагах. Заднюю подвеску выполняют зависимой или же независимой на одном поперечном рычаге. Никогда не применяют однорычажную подвеску для переднего моста и двухрычажную для заднего, так как это приводит к резкому ухудшению управляемости автомобиля.
Автомобиль может утратить управляемость вследствие поперечного проскальзывания шин по дороге, а также увода шин.
При повышении скорости автомобиля углы увода также возрастают. При этом у автомобиля с излишней шинной поворачиваемостью угол 52 увеличивается быстрее угла 51. При критической скорости автомобиль начинает двигаться криволинейно, хотя его управляемые колеса находятся в нейтральном положении. Следовательно, автомобиль с излишней шинной поворачиваемостью теряет управляемость, если его скорость больше критической. У автомобиля с недостаточной или нейтральной шинной поворачиваемостью критическая скорость отсутствует.
Чтобы обеспечить недостаточную шинную поворачиваемость автомобиля, несколько уменьшают давление воздуха в шинах передних колес по сравнению с давлением в шинах задних колес. Кроме того, центр тяжести автомобиля немного смещают в сторону переднего моста, что увеличивает часть центробежной силы, действующую на управляемые колеса.
1.1.6. Информативность
Информативность — это свойство автомобиля обеспечивать участников движения информацией, необходимой для динамического функционирования системы ВАДС. Информативность является одним из эксплуатационных свойств автомобиля, определяющих его безопасность.
Все участники дорожного движения условно могут быть разбиты на две группы: водители-операторы и другие (внешние) участники движения (пешеходы, водители других транспортных средств, регулировщики). В процессе дорожного движения водитель выступает в двух качествах одновременно: водителя-оператора и внешнего участника движения, и должен реагировать на информацию, исходящую как от управляемого им автомобиля
— внутренняя информативность, так и от других транспортных средств -внешняя информативность.
Информативность автомобиля может быть визуальной (форма и размеры автомобиля, цвет кузова, система автономного освещения, светосигнальное оборудование, элементы щитка приборов, параметры обзорности), звуковой (звуковые сигнализаторы, несущая волна, шум двигателя, трансмиссии и т.д.), тактильной (реакция органов управления на действие водителя).
1.1.7. Оборудование рабочего места водителя
Рабочее место водителя автомобиля характеризуется размерами кабины, удобством доступа к органам управления, положением сиденья, расположением по отношению к нему органов управления и эргономическими параметрами среды в кабине (шум, вибрации, микроклимат, загрязнение воздуха токсическими веществами).
Рациональная организация рабочего места имеет большое значение для безопасности движения, повышения производительности труда и сохранения здоровья водителя. Она заключается в оснащении, оборудовании и планировке рабочего места в соответствии с психофизиологическими и антропометрическими характеристиками человека. Вследствие этого рабочее место водителя может быть в различной степени удобным для управления автомобилем и по-разному влиять на работоспособность и утомляемость водителя, и точность управления автомобилем.
Эксплуатационное свойство, характеризующее рабочее место водителя (пассажира) автомобиля, называют обитаемостью или комфортностью автомобиля. Под обитаемостью понимают приспособленность рабочего места водителя (пассажира) к психофизиологическим и антропометрическим особенностям человека. Обитаемость относится к одному из свойств, характеризующих эксплуатационное качество автомобиля — его безопасность.
1.2. Пассивная безопасность
Различают внутреннюю пассивную безопасность, снижающую травматизм пассажиров, водителя и обеспечивающую сохранность грузов, перевозимых автомобилем, и внешнюю безопасность, которая уменьшает возможность нанесения повреждений другим участникам движения.
Конструктивные мероприятия, улучшающие внутреннюю пассивную безопасность, предусматривают снижение инерционных перегрузок в процессе удара, ограничение перемещения людей в салоне, устранение травмоопасных деталей, закрепление багажа и инструмента.
При столкновениях и наездах внешнюю пассивную безопасность обеспечивают прежде всего бамперы. Кроме того, применяются защитные рамки.
Процесс удара обычно разделяют на три фазы. В течение первой фазы соударяющиеся тела, сближаясь, деформируются, их кинетическая энергия частично переходит в потенциальную, а частично затрачивается на разрушение, перемещение и нагрев деталей. Во второй фазе накопленная потенциальная энергия, снова превращается в кинетическую, и тела начинают расходиться. В течение третьего периода тела не контактируют, их энергия расходуется на преодоление внешнего сопротивления. Согласно опытам НАМИ, при наезде автомобиля на неподвижное препятствие длительность первой фазы составляет 0,05-0,1 с, а второй 0,02-0,04 с.
Характер и тяжесть травмы зависят от многих причин: вида ДТП, скорости и конструкции автомобиля, наличия защитных приспособлений, возраста и здоровья человека. В среднем человек может выдержать без вреда кратковременную (в течение 0,01-0,1 с) перегрузку 40-50g. Перегрузки, испытываемые водителем и передним пассажиром при встречных столкновениях автомобилей, достигают 150-200g. Усилия, действующие на отдельные части тела, могут превышать 10 кН, что объясняет высокую смертность при некоторых ДТП.
Большое значение для определения параметров пассивной безопасности имеет среднее замедление ]ср. Оно определяется по формуле:
где v — скорость автомобиля непосредственно перед ударом, м/с;
sa — остаточная деформация автомобиля, которая при ударе о поверхность,
сравнимую по площади с лобовой площадью автомобиля, составляет:
легковые автомобили с несущим кузовом. 0,40-0,90 м
легковые автомобили с рамным основанием. 0,20-0,40 м
грузовые автомобили и автобусы. 0,15-0,30 м
Jp = 16,66 2 /(2*0,4) * 35 g Jp = 16,66 2 /(2*0,9) * 16 g
Автомобиль, врезается в бетонную стенку на скорости 60 км/ч (16,66
Перегрузка, действующая на пассажиров, составит 35 g, то есть незафиксированного ремнем человека, весящего 75 кг, ударит о приборную доску с силой в 2624 кг.
1.3. Послеаварийная безопасность
Послеаварийная безопасность — это свойство автомобиля уменьшать тяжесть последствий ДТП после остановки и предотвращать возникновение новых ДТП. К элементам послеаварийной безопасности автомобиля относятся конструктивные мероприятия и дополнительные приборы, предотвращающие возникновение опасных явлений, возникающих в результате ДТП.
Опасными явлениями, которые могут возникнуть в результате ДТП, следует, считать пожар, заклинивание дверей, заполнение водой салона автомобиля, если он затонул.
Требования к пожарной безопасности автомобиля и соответствующим элементам его конструкции регламентируются Правилами № 34-01 ЕЭК ООН. Этот документ регламентирует утечку топлива из топливного бака, заливной горловины и топливопроводов при фронтальном наезде автомобиля на препятствие со скоростью 13,9 м/с или наезде сзади со скоростью 10 м/с; утечка топлива в момент наезда не должна превышать 28 г/мин, а образование каплеобразной смеси также 28 г/мин. В ходе испытаний определяется объем жидкости, заменяющей топливо и вытекшей из бака при нарушении его герметичности, оценивается вероятность возникновения пожара и возможность его тушения имеющимися на автомобиле средствами.
Конструкции автомобилей массового производства должны отвечать следующим требованиям в отношении пожарной безопасности:
1) Предусматривается установка огнестойкой перегородки между топливным баком и пассажирским салоном. Элементы системы питания должны быть защищены от коррозии и предохранены от соприкосновения с
препятствиями на грунте. Все топливопроводы должны располагаться в защищенных местах (но не в салоне автомобиля); они не должны подвергаться каким-либо механическим воздействиям. Топливный бак следует изготовлять из огнестойкого материала; он не должен заряжаться статическим электричеством.
2) Заливная горловина не должна располагаться в салоне, багажнике или моторном отсеке и выступать над поверхностью кузова; крышка горловины должна быть огнестойкой.
3) Электропроводку следует размещать в специальных каналах или крепить к корпусу; она должна быть защищена от коррозии.
4) Для предотвращения быстрого распространения пламени и образования в салоне ядовитых газов (продуктов сгорания) регламентируются свойства материалов для внутренней отделки салона.
Кроме того, для повышения пожарной безопасности автомобилей на них устанавливают автоматически включающиеся огнетушители (как правило, пенные); штатные пенные или порошковые огнетушители; устройства, автоматически размыкающие электроцепь автомобиля при возникновении перегрузок определенной величины; устройства для автоматического впрыскивания в топливный бак веществ, превращающих бензин в трудносгораемое вещество (композиции галогенов, кремниевые соединения, специальные смолы).
В отношении заклинивания дверей автомобилей можно применять Правила № 11-02 ЕЭК ООН «Прочность замков и петель боковых дверей”. Однако следует учитывать, что если применяются дополнительные устройства, повышающие надежность замка в исправном состоянии (блокираторы дверей), то открыть дверь в деформированном виде, скорее всего, будет труднее. В ходе испытаний автомобиля на удар проверяется, чтобы двери (по одной с каждой стороны) открывались без применения инструмента.
Облегчение эвакуации людей из салона автомобиля, особенно автобуса, может быть достигнуто следующими мероприятиями:
— устройством запасных выходных люков в крыше автобуса (автомобиля);
— устройством запасных выходных люков в боковых стенках автобуса;
— снабжением дверей и люков дополнительными наружными замками и
— оборудованием салона молотками для разбивания стекол, пилами,
молотами, ножницами и другими инструментами для прорезывания
отверстий в стенках автобуса.
Предотвращение попадания воды в салон автомобиля при его затоплении пока не регламентируется международными стандартами. В какой-то мере может быть применен Российский ОСТ 37.001.248 на пылеводонепроницаемость. Единственный путь борьбы с этим явлением -повышение общей герметичности салона автомобиля. В этом направлении имеется много нерешенных вопросов. Следует отметить, что возможность спасения людей из затопленного автомобиля зависит не столько от его
конструкции (водонепроницаемости), сколько от состояния окон автомобиля (открыты или закрыты), умения людей плавать, от присутствия духа у водителя и пассажиров.
1.4. Экологическая безопасность
Экологическая безопасность — это свойство автомобиля, позволяющее уменьшать вред, наносимый участникам движения и окружающей среде в процессе его нормальной эксплуатации. Мероприятиями по уменьшению вредного воздействия автомобилей на окружающую среду следует считать снижение токсичности отработавших газов и уровня шума.
Основными загрязняющими веществами при эксплуатации автотранспорта являются:
— нефтепродукты при их испарении;
— продукты истирания шин, тормозных колодок и дисков сцепления, асфальтовых и бетонных покрытий.
Наибольший загрязняющий эффект из всего перечисленного оказывают отработавшие газы. К основным вредным компонентам отработавших газов автомобилей относятся окись углерода СО (сильное токсичное вещество), углеводороды СНх, окислы азота NOx (токсичны, вместе с углеводородами СН образует фотохимический смог), альдегиды (вредно действуют на нервную систему и органы дыхания), твердые частицы (сажа), окислы серы БОх, бензапирен, соли свинца (сильно действующие токсичные вещества).
В настоящий момент в России действуют допустимые нормы по токсичности выхлопных газов Евро II (согласно Правилам №49, 83 ЕЭК ООН), введенные с 1 января 2001 г.
В Европе этот стандарт действует с 1996 г., а нормы Евро III вступают в силу с 1 октября 2001 года. Причем все они будут обязательны для российских
транспортных средств, работающих за границей. Кроме того, если российский автомобиль выпущен после октября 2001 года, то он должен удовлетворять нормам Евро III.
В Евро II регламентируемый уровень выбросов дизельных двигателей грузовых автомобилей полной массой свыше 3,5 т составляет (в г/кВт*ч): СО (окись углерода) — 4,0; СН (углеводороды) — 1,1; КОх (оксиды азота) — 7,0; РМ (твердые частицы) — 0,15.
В Евро III требования к токсичности выхлопа ужесточаются -регламентируемый уровень выбросов дизельных двигателей грузовых автомобилей полной массой свыше 3,5 т составит (в г/кВт*ч): СО (окись углерода) — 2,0; СН (углеводороды) — 0,6; КОх (оксиды азота) — 5,0; РМ (твердые частицы) — 0,1. Для бензиновых двигателей легковых автомобилей уровень выбросов в г/км: CO — 2,3; CH — 0,2; NOx — 0,15.
При движении автомобиля шум создается двигателем внутреннего сгорания, шасси автомобиля (в основном механизмами трансмиссии и кузовом) и в результате взаимодействия шин с дорожным покрытием.
У технически исправного легкового автомобиля, имеющего небольшой пробег, основной источник шума — взаимодействие шин с дорожным покрытием, у грузового автомобиля шум шин составляет меньшую долю. В результате взаимодействия колеса с дорожным покрытием возникает шум, уровень и характеристики которого зависят от типа автомобиля, конструкции подвески, рисунка протектора, нагрузки на шину, ее жесткости и давления в ней.
Шум от работы двигателя внутреннего сгорания возникает во впускном тракте карбюратора и трубопроводе; в газораспределительном клапанном механизме в результате взаимодействия толкателей с клапанами; в зубчатых, а также в цепных и ременных передачах между коленчатым и распределительным валами; в системе охлаждения двигателя вследствие работы вентилятора, ременной передачи и водяного насоса; в выпускной системе. Шум возникает также в зубчатых зацеплениях коробки передач и ряде других второстепенных (по шуму) механизмов.
В элементах шасси технически исправного (нового) автомобиля и его кузове шум создается при работе механизмов трансмиссии элементах подвески и в результате обтекания кузова воздушным потоком при движении.
Шум, создаваемый отдельным автомобилем (автопоездом), регламентируется рядом нормативных документов, основными из которых являются Правила № 9 ЕЭК ООН. Шум выпускаемых отечественной автомобильной промышленностью транспортных средств в основном соответствует этим нормам.
2. Подушка безопасности автомобиля ВАЗ
Подушка, безопасности — система пассивной безопасности (SRS, Supplementary Restraint System) в транспортных средствах.
Представляет собой эластичную оболочку, которая наполняется воздухом либо другим газом. Подушки безопасности широко используются для смягчения удара в случае автомобильного столкновения.
Пневмоподушка дополняет ремень безопасности, уменьшая шанс удара головы и верхней части тела пассажира о какую-либо часть салона автомобиля. Также они снижают опасность получения тяжелых травм, распределяя силу удара по телу пассажира.
«Недавно проведенное исследование показало, что более чем 6.000 жизней было спасено благодаря подушкам безопасности».
Стандартные плечевые ремни безопасности были фактически убраны в автомобилях выпуска 70-х, оснащенных подушками безопасности, которые были призваны заменить ремни при лобовых столкновениях. Подушка. безопасности на стороне пассажира была расположена в нижней части панели, что позволяло ей также защищать колени пассажира. Нижняя часть панели на водительском месте также отличалась своей выпуклостью.
Дженерал Моторз назвала свою систему ACRS (Air Cushion Restraint System). Она включает в себя боковую подушку безопасности для пассажира в автомобилях выпуска 70-х и предусматривает двухступенчатое развертывание как и более поздние системы.
Принцип действия основывается на использовании простого акселерометра, инициирующего химическую реакцию в специальном баллончике. В результате реакции происходит быстрое наполнение газом нейлоновой подушки, которая уменьшает перегрузку, испытываемую пассажиром в момент резкой остановки при столкновении. Подушка также имеет небольшие вентиляционные отверстия, которые используются для относительно медленного стравливания газа после удара пассажира об неё.
Фронтальные подушки безопасности не должны развертываться при боковом ударе, ударе в заднюю часть либо перевороте автомобиля. Из-за того, что подушки безопасности срабатывают лишь раз и затем быстро сдуваются, они бесполезны при последующем столкновении. Ремни безопасности помогают снизить риск получения тяжелых травм во многих случаях. Они способствуют правильному расположению пассажира в кресле для максимизации эффективности подушки безопасности, а также защищают пристегнутых пассажиров при первом и последующих столкновениях. Таким образом, жизненно необходимо пристегиваться, даже в машинах, оборудованных подушками безопасности.
Хотя в 60-х и 70-х годах они рекламировались как потенциальная замена ремней, в нынешнее время подушки безопасности продаются как дополнительное средство защиты. Максимально эффективно они работают вместе с ремнями безопасности. Автопроизводители пересмотрели свою точку зрения насчет замены подушками безопасности столь необходимых ремней.
Общая схема работы
Система подушек безопасности включает в себя три главных компонента:
-непосредственно сам модуль подушки безопасности
-датчики определения удара
Некоторые системы могут также иметь переключатель on/off (вкл/выкл) для отключения в случае надобности.
Модуль подушки безопасности содержит в себе блок наполнения и легкую нейлоновую подушку. Модуль водительской подушки безопасности
находится в центре рулевого колеса, а пассажира — в приборной панели. Полностью наполненная газом водительская подушка имеет примерно диаметр большого надувного пляжного мячаШаблон:НЕТ АИ. Пассажирская же может быть в два-три раза больше, так как дистанция между сидящим справа пассажиром и приборной панелью гораздо больше нежели расстояние между водителем и рулем.
Датчики удара расположены в передней части автомобиля и/или салоне. Автомобили могут быть оснащены одним и более датчиками, которые активируются под воздействием сил, возникающих при лобовом или близком к лобовому ударе. Датчики измеряют степень замедления, с которой машина сбрасывает скорость. Именно поэтому замедление автомобиля, при котором датчики активируют подушки, варьируется в зависимости от характера столкновения. Подушки безопасности не должны срабатывать при внезапном торможении или при езде по неровным поверхностям. На самом деле, максимальный уровень замедления при экстренном торможении составляет лишь незначительную часть от уровня, достаточного для приведения подушек безопасности в действие.
Блок диагностики следит за исправностью системы подушек безопасности. Он активируется при включении зажигания автомобиля. Если блок диагностики обнаружит неисправность, загорится лампочка, предупреждающая водителя о необходимости доставки автомобиля в авторизованный центр обслуживания для диагностики системы подушек безопасности. Большинство блоков диагностики имеют устройства, которые содержат достаточно электрической энергии для приведения подушек безопасности в действие, если основная аккумуляторная батарея будет быстро выведена из строя при столкновении.
Некоторые автомобили без задних сидений, такие как пикапы и кабриолеты, либо задние сидения которых слишком малы для установки детских сидений, имеют ручной переключатель on/off (вкл/выкл) для пассажира справа, установленный на заводе. Такие переключатели для водительской и пассажирской подушки безопасности могут быть установлены квалифицированным обслуживающим персоналом по запросу владельца транспортного средства, если он отвечает определенным государственным критериям и имеет разрешение.
Сперва большинство автомобилей комплектовалось лишь одной водительской подушкой безопасности (DAB), установленной в рулевом колесе и защищающей водителя (который имеет больше шансов получить травмы). На протяжении 90-х годов подушки для передних пассажиров (PAB), а затем раздельные боковые подушки (SAB), помещаемые между пассажирами и дверью, стали обычной практикой.
Подушка может серьезно ранить или даже убить непристегнутого ребенка, который сидит слишком близко к ней или же был выброшен вперед силой экстренного торможения. По мнению специалистов для безопасности ребенка необходимы следующие условия:
Дети должны перевозиться в правильно установленном и соответствующем возрасту автомобильном кресле на заднем сиденье. Внимательно изучите соответствующий раздел в инструкции к автомобилю.
Младенцы, перевозимые в кресле с задним расположением, (в возрасте до одного года и весом менее 10 кг) не должны находиться на переднем пассажирском сиденье при включенной подушке безопасности.
Если ребенок старше одного года вынужден ехать на переднем сиденье, оборудованном подушкой безопасности со стороны пассажира, то он или она должны сидеть в детском кресле ориентированном по направлению движения, или пристегнуты с использованием коленного или плечевого ремня, а сиденье должно быть отодвинуто назад насколько возможно.
Подушки безопасности для пешеходов
Разрабатываются опытные образцы подушек безопасности, расположенных снаружи автомобиля, перед ветровым стеклом.
Такие подушки раскрываются от сигнала сенсора переднего бампера и предотвращают удар головы пешехода о лобовое стекло (около 80 % смертей при столкновении).
Подушки безопасности для велосипедистов. Дизайнеры Анна Хаупт (Anna Haupt) и Тереза Алстин (Terese Alstin) из Швеции разработали прототип подушки безопасности для мотоциклистов и велосипедистов под названием Hovding, которая надувается в случае падения и предохраняет голову и шею от серьезных травм. Подушка. находится внутри водонепроницаемого тканевого чехла и в сложенном состоянии крепится вокруг шеи пилота. В момент падения подушка расскрывается за 0.1 секунду, обеспечивая защиту не хуже, чем обычный мотоциклетный шлем.
Заключение
Развитие современных видов транспорта позволяет обществу добиваться существенной экономии труда и времени, сокращать продолжительность процессов производства и обращения товаров, высвобождать время для общественно-полезной деятельности, образования и отдыха. Надземный, наземный, подземный и водный — это те виды транспорта, которые сейчас осуществляют перевозку грузов и пассажиров. Наиболее экономичным и перспективным является автомобильный транспорт, бурное развитие которого обусловлено большой подвижностью, высокой скоростью перевозки грузов, доставки грузов к адресату без промежуточных перегрузок и др.
Высокое качество современных автомобилей и автомобильных дорог, а также хорошая организация движения во многом облегчают труд водителя, уменьшают потенциальную возможность возникновения дорожнотранспортных происшествий (ДТП). Однако аварийность на автомобильных дорогах продолжает оставаться очень высокой и является подлинным бедствий во многих странах с развитым автомобильным движением. По данным Всемирной организации здравоохранения (ВОЗ) ежегодно в результате ДТП в мире погибают 1,3 млн. человек, 20-50 млн. получают травмы.
В России в практически каждый год от ДТП погибает свыше 35 тыс. человек, а увечья получают более 200 тыс. человек, причем 14 тыс. из них остались инвалидами навсегда.
Весь мир занят сейчас поисками мер борьбы с ДТП. Статистические данные последних десятилетий показывают, что в развитых странах смертность от ДТП ежегодно снижается, например в США за период с 1974 по 1998 год она уменьшилась на 27 %, а в странах с низким и среднем уровнем доходов, наоборот увеличивается. При правительствах многих стран созданы общегосударственные органы безопасности движения, проводится большая исследовательская работа по совершенствованию конструкции автомобилей, улучшению качества дорог и организации движения, профессиональному отбору водителей и их подготовке.
Похожие записи:
- Правила перевозки детей в автомобиле в 2022 году
- Пожарная безопасность закрытых паркингов и подземных автостоянок
- Правила безопасности в автомобиле
- Современные системы безопасности в автомобиле: активные и пассивные
Источник https://xn--d1aux.xn--p1ai/analiz-informatsionnoj-bezopasnosti-sovremennogo-avtomobilya/
Источник https://kompauto.ru/bezopasnost/diplomnye-raboty-na-temu-bezopasnost-dorozhnogo-dvizheniya/
Источник